Метод на управление на скоростта на Уорд Леонард или контрол на напрежението на арматурата
Метод на Уорд Леонард контрол на скоростта се постига чрез промяна наприложено напрежение към арматурата. Този метод е въведен през 1891 г. Схемата за свързване на метода на Уорд Леонард за управление на скоростта на DC шунтовия мотор е показана на фигурата по-долу.

- Характеристика на въртящия момент и мощността
- Предимства на Ward Leonard Drives
- Недостатъци на класическата система Леонард на Уорд
- Приложения на Уорд Леонард Дискове
- Контрол на твърдо състояние или Статична система Леонард
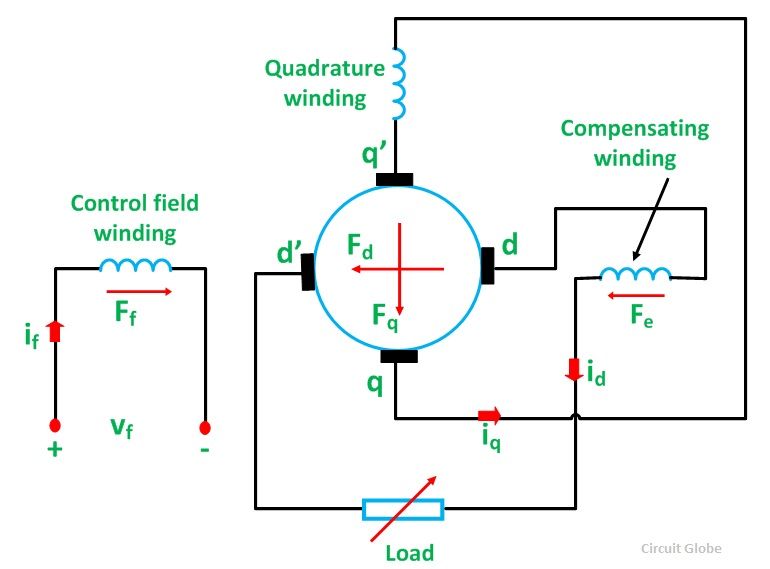
В горната система М е основният двигател за постоянен ток, чийтоскоростта трябва да се контролира, а G е отделно възбуден генератор на постоянен ток. Комбинацията от AC задвижващ двигател и DC генератор се нарича Комплект мотор-генератор (M-G).
Напрежението на генератора се променя отпромяна на тока на полето на генератора. Това напрежение, когато се прилага директно към котвата на главния двигател за постоянен ток, скоростта на двигателя M се променя. Ток на моторното поле IFM се поддържа постоянно, така че потока на полето на двигателя fieldm също остава постоянна. Докато скоростта на двигателя се управлява, токът на котвата на двигателя Ia се поддържа равен на номиналната стойност.
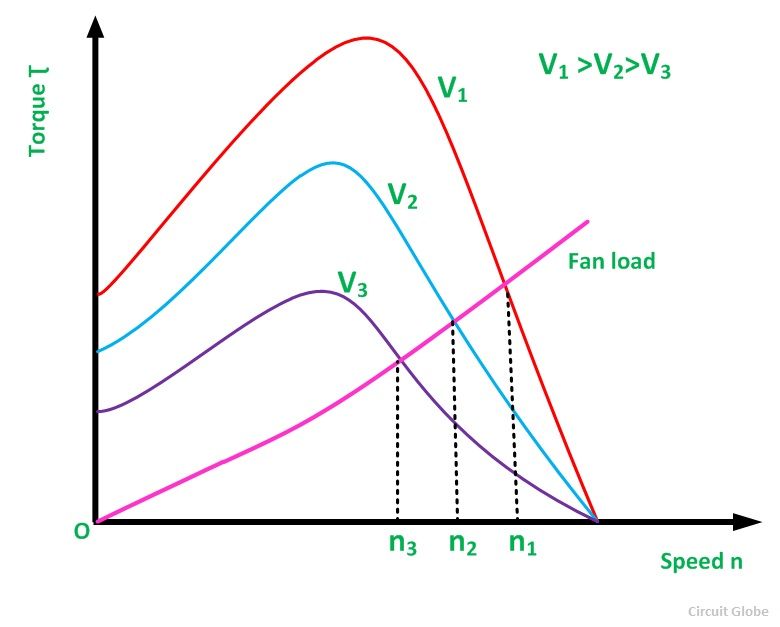
Генерираният ток на поле Iеж варира така, че напрежението на котвата VT се променя от нула до номиналната стойност. Скоростта ще се променя от нула до основната скорост. Тъй като управлението на скоростта се извършва с номинален ток Ia и с постоянния поток на моторното поле, постоянният въртящ момент е правопропорционален на тока на котвата и се получава полев поток до номиналната скорост. Продуктът на въртящия момент и скоростта е известен като мощност и е пропорционален на скоростта. По този начин, с увеличаването на мощността, скоростта се увеличава автоматично.
Най- Характеристика на въртящия момент и мощността е показана на фигурата по-долу.

Следователно, с метода за контрол на напрежението на котвата,постоянният въртящ момент и променливата задвижваща мощност се получават от скоростта под основната скорост. Методът за контрол на полевия поток се използва, когато скоростта е над базовата скорост. В този режим на работа токът на котвата се поддържа постоянен при номиналната си стойност и напрежението на генератора VT се поддържа постоянно.
Токът на моторното поле се намалява и в резултат на това потокът на моторното поле също намалява. От VTаза и EIа остават постоянни, електромагнитният въртящ момент е правопропорционален на полевия поток ϕm и тока на котвата Iа, Така, ако полевият поток на двигателя е намален, въртящият момент намалява.
Затова въртящият момент намалява, както скоросттасе увеличава. По този начин в режим на управление на полето се получават постоянна мощност и променлив въртящ момент за скорости над основната скорост. Когато се изисква регулиране на скоростта в широк диапазон, се използва комбинация от контрол на напрежението на котвата и контрол на полевия поток. Тази комбинация позволява съотношението на максималните до минималните скорости да бъде от 20 до 40. За управление със затворен контур, този обхват може да бъде удължен до 200.
Задвижващият двигател може да бъде индукционен илисинхронен двигател. Асинхронен двигател работи с изоставащ фактор на мощността. Синхронният двигател може да работи при водещ фактор на мощността чрез прекомерно възбуждане на неговото поле. Водещата реактивна мощност се генерира от свръх възбуден синхронен двигател. Той компенсира изоставащата реактивна мощност, взета от други индуктивни товари. По този начин факторът на мощността се подобрява.
Асинхронен двигател с пръстеновидни пръстени се използва като двигател, когато товарът е тежък и периодичен. На вала на двигателя е монтиран маховик. Тази схема е известна като Уорд Леонард-Илгенер схема. Той предотвратява големи колебания в захранващия ток.
Когато синхронният двигател действа като шофиранедвигателят, колебанията не могат да бъдат намалени чрез монтиране на маховик на неговия вал, тъй като синхронният двигател винаги работи с постоянна скорост. В друга форма на задвижване на Ward Leonard, неелектрическите първични двигатели могат също да се използват за задвижване на DC генератора.
Например - В електрически локомотив с постоянен ток се задвижва генератор на постоянен токс дизелов двигател или газови турбини и корабни задвижващи устройства. В тази система регенеративното спиране не е възможно, тъй като енергията не може да тече в обратна посока в основния двигател.
Предимства на Ward Leonard Drives
Основните предимства на Ward Leonard са както следва: -
- Възможно е плавно регулиране на скоростта на DC мотора в широк диапазон и в двете посоки.
- Той има присъщ спирачен капацитет.
- Задържащите реактивни волта-ампери се компенсират чрез използване на превъзбуден синхронен двигател като задвижващ механизъм и по този начин се подобрява цялостният фактор на мощността.
- Когато натоварването е прекъсващо, както при валцовъчните машини, задвижващият двигател е асинхронен двигател с монтиран маховик, за да изглади прекъсващото натоварване до ниска стойност.
Недостатъци на класическата система Леонард на Уорд
Системата на Ward Leonard с въртящи се генератори на моторни генератори има следните недостатъци.
- Първоначалните разходи на системата са високи, тъй като е монтиран комплект моторни генератори, със същия рейтинг като този на главния DC двигател.
- По-голям размер и тегло.
- Изисква голяма площ
- Скъпа основа
- Поддържането на системата е често.
- По-високи загуби.
- По-ниска ефективност.
- Задвижването произвежда повече шум.
Приложения на Уорд Леонард Дискове
Задвижванията Ward Leonard се използват там, където се изисква плавен контрол на скоростта на DC двигателите в широк диапазон и в двете посоки. Някои от примерите са следните: -
- Валцови мелници
- Асансьори
- Кранове
- Мелници за хартия
- Дизелови електрически локомотиви
- Минни подемници
Контрол на твърдо състояние или Статична система Леонард
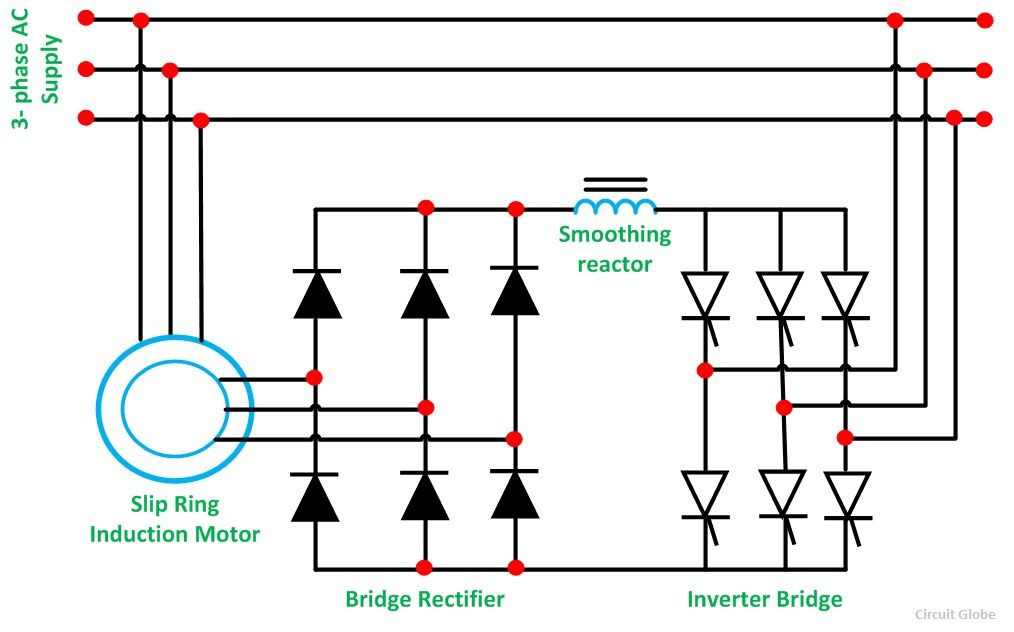
В днешно време Статична система на Леонард най-често се използва. В тази система въртящият се двигател-генератор (M-G) се заменя с твърд конвертор, за да се контролира скоростта на DC двигателя. Контролирани изправители и хеликоптери се използват като конвертор.
В случай на захранване с променлив ток, контролираноизправителите се използват за преобразуване на фиксирано захранващо напрежение в променливотоково захранващо напрежение. В случай на захранване с постоянен ток хеликоптерите се използват за получаване на променливо DC напрежение от постоянното постоянно напрежение.