Ovládání sekačky samostatného excitovaného stejnosměrného motoru
Měnič převádí pevné stejnosměrné napětí naproměnné stejnosměrné napětí. Pro výrobu chopperů se používají samo-komutovaná zařízení (přímo na nebo mimo zařízení přes bránu) jako MOSFET, IGBT, výkonové tranzistory, GTO a IGCT, protože mohou být komutovány řídicím signálem s nízkou spotřebou a nepotřebují komutační obvod.
Sekačka byla provozována při vysoké frekvenci kvůlicož zvyšuje výkon motoru snížením zvlnění a odstraněním diskontinuálního vedení. Nejdůležitějším znakem ovládání sekačky je, že regenerační brzdění se provádí při velmi nízké generovací rychlosti, když je pohon napájen z pevného napětí na nízké stejnosměrné napětí.
Řízení motoru
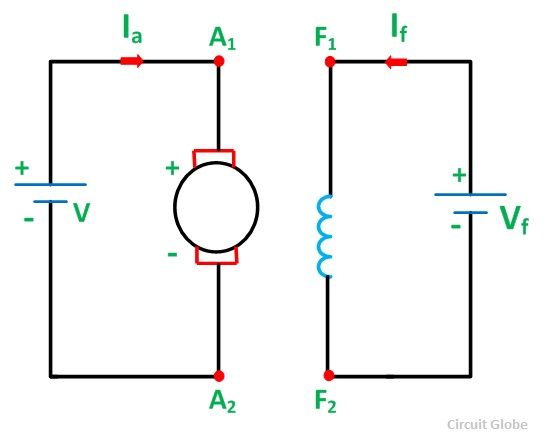
Motor s odděleným budičem řízený tranzistorem je zobrazen na následujícím obrázku. Tranzistor Tr je provozován periodicky s periodou Tr a zůstává otevřený po dobu trvání Tna.Procesy napětí svorky motoru a proudu kotvy jsou uvedeny na následujícím obrázku. Během terminálu motoru je napětí V a je popsán provoz motoru

Při t = tna, Tr je vypnuta. Motorové volnoběhy přes diodu DF a napětí terminálu motoru je během intervalu nulové tna≤ t ≤ T. Provoz motoru v tomto intervalu je známý jako interval volnoběhu a je popsán v kapitole
Proud motoru klesá z ia2 až ia1 během tohoto intervalu. Poměr pracovního intervalu tna na periodu chopperu T se nazývá pracovní cyklus.
Regenerační brzdění
Sekačka pro regenerativní brzdění je znázorněna na obrázku níže. Tranzistor Tr je provozován periodicky s periodou T a obdobím tna. Průběh napětí svorky motoru va a proud kotvy ia pro průběžné vedení je znázorněno na obrázku níže. Pro zvýšení hodnoty L se přidá externí indukčnosta. Když je tranzistor zapnutý, ia vzrostl z ia1 až ia2.


Když je tranzistor vypnut, proud kotvy protéká diodou D a zdrojem V a snižuje se z ia2 až ia1. Uložená elektromagnetická energie a energie dodávaná strojem jsou přiváděny do zdroje. Interval 0 ≤ t ≤ tna se nazývá interval ukládání energie a interval tna ≤ t ≤ T nazývá interval pracovní doby.
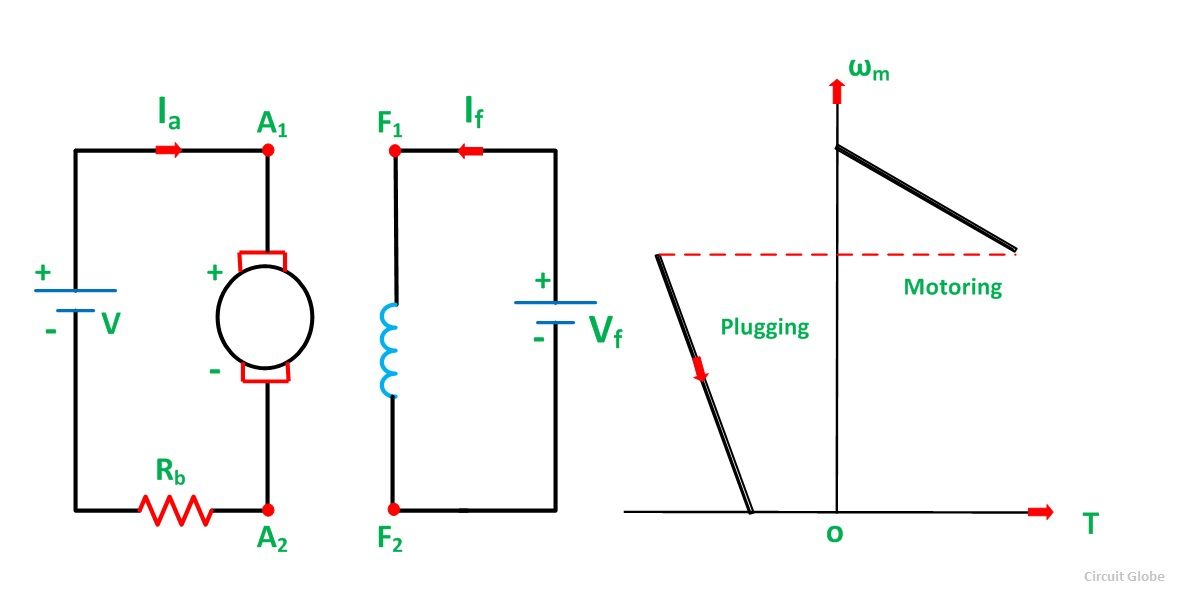
Řízení vpřed a řízení brzd
Přední motorový provoz sekačky je získán tranzistorem Tr1 s diodou D1.Tranzistor Tr2 a dioda D2 zajišťují řízení dopředného regeneračního brzdění.

Pro motorický provoz tranzistor Tr1 je řízen a pro brzdný provoz tranzistor Tr2 je řízena. Posunutí řízení z Tr1 do Tr2 přemístit provoz z motoru na brzdu a naopak.
Dynamické řízení
Dynamický brzdový okruh a jeho průběh jsou uvedeny na obrázku níže. Během intervalu mezi 0 ≤ t ≤Tna, ia vzrůstá z ia1 až ia2. Část energie je uložena v indukčnosti a zbytek je rozptýlen v Ra a TR.