Brzdění indukčním motorem
Brzdění je proces snižování rychlostiindukčního motoru. Při brzdění pracuje motor jako generátor vyvíjející záporný točivý moment, který odporuje pohybu motoru. Brzdění asynchronního motoru je převážně rozděleno do tří typů. Oni jsou
- Regenerační brzdění
- Zapojení nebo brzdění s reverzním napětím
- Dynamické brzdění
- AC dynamické brzdění
- Dynamické brzdění
- Dynamické brzdění DC
- Brzdění s nulovým sledem
Níže je podrobně vysvětleno brzdění indukčního motoru.
1. Regenerační brzdění
Vstupní výkon pohonu indukčního motoru je dán níže uvedeným vzorcem
Kde φs je fázový úhel mezi fázovým napětím statoru a proudem statorové fáze Is. Pro motorický provoz je fázový úhelvždy menší než 90 °. Pokud se rychlost rotoru zvýší nad synchronní otáčky, pak relativní rychlost mezi rotorovým vodičem a rotujícím polem vzduchové mezery zpět.

Toto obrácení rotoru indukuje emf, proud rotoru a složku statorového proudu, který vyvažuje otáčky ampérového rotoru. Když φs je větší než 90 °, pak se výkonový proud obrátí a dává regenerační brzdění. Magnetizační proud vytvářel tok vzduchové mezery.
Charakter křivky točivého momentu otáček je zobrazen vvýše. Je-li frekvence napájení pevně nastavena, je rekuperační brzdění možné pouze u rychlostí vyšší než synchronní. Při rychlostech s proměnnou frekvencí nemůže být tato hodnota dosažena pro rychlost pod synchronní rychlostí.
Hlavní výhodou regeneračního brzdění jegenerovaného výkonu. Hlavní nevýhodou je, že když je motor napájen ze zdroje s konstantní frekvencí, nemůže použít nižší než synchronní otáčky.
2. Zapojení
Když je sled fází napájení motoruProvoz při otáčkách je obrácen výměnou spojení dvou fází statoru na napájecí svorce, změna provozu z motoru na zástrčku podle obrázku níže. Zapojení je rozšíření motorické charakteristiky pro záporný sled fází z kvadrantu na třetí. Převrácení sledu fází obrátí směr rotujícího pole.

3. Dynamické brzdění
- AC dynamické brzdění - Dynamické brzdění se dosahuje při motoruběží na jednofázovém napájení odpojením jedné fáze od zdroje a buď ponecháním otevřené nebo připojením k jiné fázi. Obě spojení jsou označována jako dvě a tři přívody.

Při připojení k jedné fázi připojte motormůže být považován za napájený kladným a záporným sledem třífázové sady napětí. Celkový točivý moment generovaný strojem je součtem točivého momentu způsobeného kladným a záporným napětím. Když má rotor vysoký odpor, pak je točivý moment záporný a je dosažen brzdný provoz.
Předpokládejme, že je otevřená fáze A motoru připojeného k hvězdy. Pak se tok proudu fází A stane nula, tj. Ia = 0 a proud přes další dvě fáze je IB = - JáD.
Složka pozitivní a negativní sekvence Istr a ján jsou reprezentovány rovnicí.

Kde α = ej20 °
- Vlastní buzení s využitím kondenzátoru - V této metodě jsou tři kondenzátorytrvale připojena k motoru. Hodnota kondenzátoru je zvolena tak, že při odpojení od vedení pracuje motor jako samočinně indukovaný indukční generátor. Brzdění a proces samočinného buzení je znázorněn na následujícím obrázku.

Křivka A je magnetizační křivka bez zatíženía čára B představuje proud přes kondenzátor. E je napětí indukované statorem na fázi vedení. Kondenzátor dodává potřebný jalový proud pro buzení.
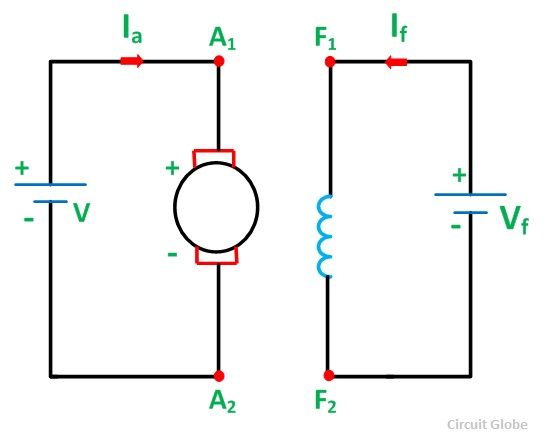
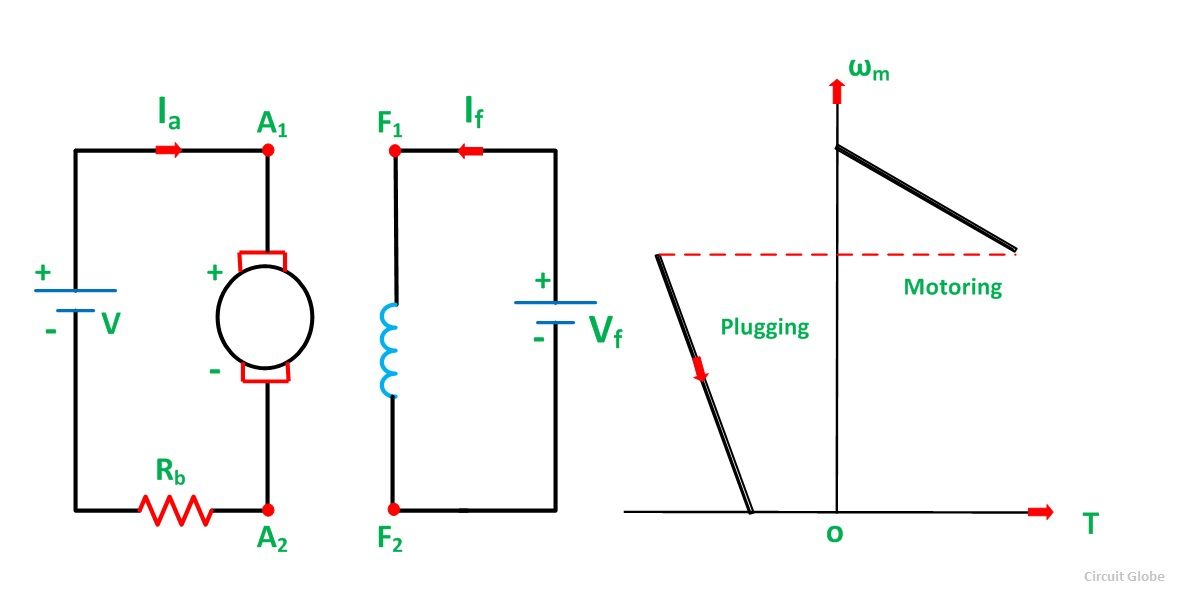
- Dynamické brzdění DC - V tomto způsobu je stator indukce připojen přes DC napájení. Metoda získávání stejnosměrného napájení pomocí diodového můstku je znázorněna na obrázku níže.


Proud stejnosměrného proudu přes statorprodukuje stacionární magnetické pole a pohyb rotoru v tomto poli vytváří napětí ve stacionárních vinutích. Stroj proto pracuje jako generátor a generovaná energie je rozptýlena v odporu obvodu rotoru, což dává dynamické vinutí.

- Brzdění s nulovou sekvencí - Při tomto brzdění jsou tři fáze statorujsou zapojeny v sérii přes jeden AC nebo DC zdroj. Takový typ spojení je znám jako spojení nulové sekvence, protože proud ve všech třech fázích je kofázový. Charakter křivky točivého momentu pro AC a DC napájení je znázorněn na obrázku níže.

Při napájení střídavým proudem by mohlo být použito brzděnípouze do jedné třetiny synchronní rychlosti. Brzdný moment, který vzniká tímto spojením, je značně větší než motor. S bržděním stejnosměrného napájení je k dispozici celý rozsah otáček a brzdění je nezbytné pro dynamické brzdění, protože veškerá generovaná energie je promarněna v odporu rotoru.