Types de moteur à courant continu
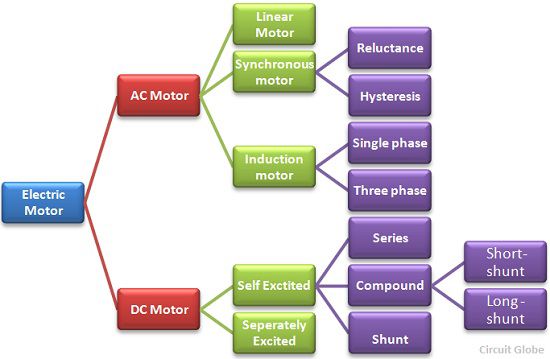
UNE Moto à courant continur, DC est nommé en fonction de la connexion du bobinage inducteur avec l'armature. Il existe principalement deux types de moteurs à courant continu. Tout d'abord, on est Séparément Excité Moteur à courant continu et Auto-excité Docteur moteur. Les moteurs auto-excités sont en outre classés comme Blessure par shunt ou moteur shunt, Série blessure ou moteur de série et Plaie composée ou moteur composé.
Le moteur à courant continu convertit le courant électrique enla puissance mécanique est appelée moteur à courant continu. La construction du moteur à courant continu et du générateur sont identiques. Mais le moteur à courant continu a une large plage de vitesse et une bonne régulation de vitesse en traction électrique.Le principe de fonctionnement du moteur à courant continu repose sur le principe que le conducteur sous tension est placé dans le champ magnétique et qu’il subit une force mécanique.
Le moteur à courant continu est généralement utilisé à l'emplacementselon le besoin, dans une armoire de protection, par exemple anti-gouttes, anti-feu, etc. La description détaillée des différents types de moteur est donnée ci-dessous.
Contenu:
- Moteur à courant continu excité séparément
- Moteur à courant continu auto-excité
- Moteur à enroulement shunt
- Moteur à plaie série
- Moteur à plaie composé
Moteur à courant continu excité séparément
Comme son nom l'indique, les bobines de champ ou les enroulements de champ sont alimentés par une source CC distincte, comme indiqué dans le schéma de circuit ci-dessous.

Moteur à courant continu excité séparément
Moteur à courant continu auto-excité
Comme son nom l'indique, l'auto-excitétype de moteur, le courant dans les enroulements est fourni par la machine ou le moteur lui-même. Le moteur à courant continu auto-excité est divisé en un moteur bobiné en série et un moteur bobiné en série. Ils sont expliqués ci-dessous en détail.
Moteur à enroulement shunt
Ce sont les types les plus courants de moteur à courant continu. Ici, l'enroulement de champ est connecté en parallèle avec l'induit, comme indiqué sur la figure ci-dessous.

Moteur CC à enroulement shunt
Les équations de courant, de tension et de puissance pour un moteur shunt sont écrites comme suit.
En appliquant KCL à la jonction A de la figure ci-dessus.
La somme des courants entrants en A = La somme des courants sortants en A.
Où,
I est le courant de ligne d'entrée
Ia est le courant d'induit
Ish est le courant de champ de shunt
L'équation (1) est l'équation actuelle.
Les équations de tension sont écrites en utilisant la loi de tension de Kirchhoff (KVL) pour le circuit d’enroulement de champ.

Pour le circuit de bobinage d'induit, l'équation sera donnée par
L'équation de puissance est donnée comme
Puissance absorbée = puissance mécanique développée + pertes dans l'armature + perte sur le terrain.

En multipliant l'équation (3) par Ia, nous obtenons les équations suivantes.

Où,
VIune est le courant électrique fourni à l'armature du moteur.
Moteur à plaie série
Dans le moteur en série, le bobinage inducteur est connecté en série avec le bobinage d'induit. Le schéma de connexion est présenté ci-dessous.

Moteur à plaie série
En appliquant le KCL dans la figure ci-dessus

Où,
jese est le courant de champ en série
L'équation de tension peut être obtenue en appliquant KVL dans la figure ci-dessus.
L'équation de puissance est obtenue en multipliant l'équation (8) par I nous obtenons

Puissance absorbée = puissance mécanique développée + pertes dans l'armature + pertes sur le terrain
En comparant les équations (9) et (10), nous obtiendrons l'équation ci-dessous.
Moteur à plaie composé
Un moteur à courant continu ayant à la fois des enroulements de champ en série et en dérivation est appelé un Moteur composé. Le schéma de connexion du moteur composé est présenté ci-dessous.
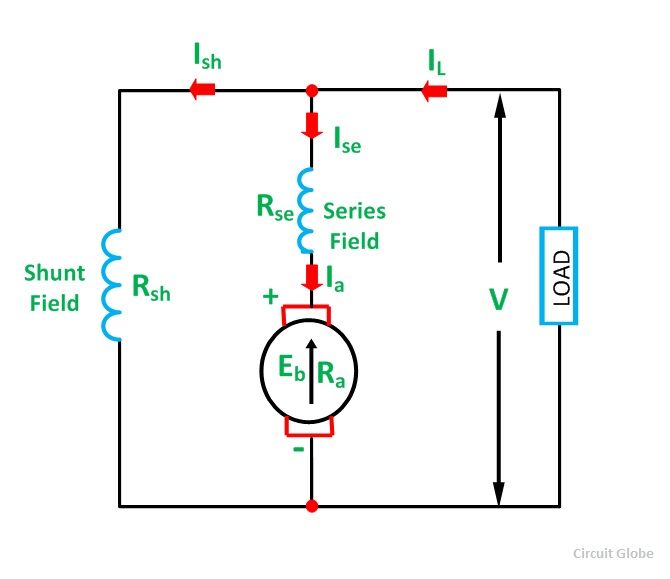
Moteur composé
Le moteur composé est ensuite subdivisé en Composé Cumulatif Moteur et Composé différentiel Moteur. Dans un moteur composé cumulatif, le flux produit par les deux enroulements va dans le même sens, c'est-à-dire
Dans un moteur composé différentiel, le flux produit par les enroulements de champ en série est opposé au flux produit par l’enroulement de champ shunt, c.-à-d.
Les signes positif et négatif indiquent la direction du flux produit dans les enroulements du champ.