Jednadžba zamaha
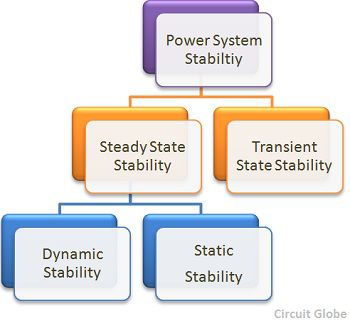
Prijelazna stabilnost sustava može bitiodređuje se pomoću jednadžbe ljuljanja. Neka je θ kutni položaj rotora u bilo kojem trenutku t. θ se kontinuirano mijenja s vremenom, te je prikladno mjeriti ga s obzirom na referentnu os, prikazanu na slici ispod. Kutni položaj rotora je dan jednadžbom

θ - kut između polja rotora i referentne osi
wa - sinkrona brzina
δ - kutni pomak
Diferencijacija jednadžbe (1) daje




Tla - zakretni moment
Ta - okretni moment osovine
Te - elektromagnetski moment
Kutni moment rotora izražava se jednadžbom

w - sinkrona brzina rotora
J - moment inercije rotora
M - kutni moment rotora
Pomnožite obje strane jednadžbe (5) s w dobivamo

Pa - mehanički unos snage
Pe - izlaz električne energije
Pla - ubrzavajuća snaga
Ali,