דינמיקה של כוננים חשמליים
כאשר המנוע מסתובב, עומס המערכתעשוי לסובב או לעבור תנועה translational. בתנועה translational, המיקום של הגוף משתנה מנקודה לנקודה בחלל. מהירות העומס עשויה להיות שונה מזו של המנוע.
אם עומס יש חלקים שונים, המהירות שלהם עשויתהיה שונה. חלק מהרוטור עשוי לסובב בעוד שאחרים עשויים לעבור תנועה translational. מערכת העומס המקבילה של המנוע מוצגת בתרשים שלהלן.
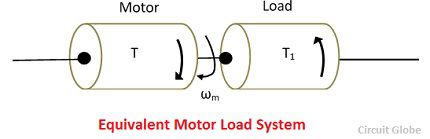
ωM - מהירות זוויתית מיידית של מוט המנוע, rad / sec.
T - הערך המיידי של מומנט המנוע המפותח, N-m.
T1 - הערך המיידי של מומנט עומס, המכונה מוט המנוע, N-m.
המשוואה המוצגת להלן מתארת את עומס המנועמשוואה.משוואה זו תקפה עבור כוננים אינרציה משתנה כגון שלי, winders, סליל, כוננים, רובוטים תעשייתיים. במשוואה זו, מומנט העומס כולל חיכוך ומומנט פיתול של המנוע.

ההאצה או ההידרדרות של הכונןתלוי בעיקר אם מומנט העומס גדול או קטן יותר מאשר מומנט המנוע. במהלך ההאצה, המנוע מספק את מומנט העומס יחד עם רכיב jdω מומנט נוסףMt / dt כדי להתגבר על אינרציה הכונן.
הכוננים שיש להם אינרציה גדולה חייביםלהגדיל את מומנט עומס על ידי כמות גדולה לקבלת האצה מספיק. הכונן הדורש תגובה מהירה חולפת, מומנט המנוע שלהם צריך להישמר על ערך מופרז מערכת עומס המנוע צריך להיות מתוכנן עם אינרציה אפשרי נמוך יותר.
האנרגיה הקשורים מומנט דינמי מאוחסן בצורה של אנרגיה קינטית נתון על ידי המשוואה jdω2M/ dt. במהלך הדיסקלציה, מומנט דינמי יש סימן שלילי. כך הוא מסייע מנוע פיתחה מומנט T ושומרת על תנועת הכונן על ידי חילוץ אנרגיה מן האנרגיה הקינטית המאוחסן.