מנוע צעדים
השם מנוע צעדים עצמה מראה כי תנועת הרוטור נמצאתצורה של שלבים שונים או צעדים נפרדים. זה ידוע גם בשם מנוע דריכה. מספר הפולסים המוזנים במעגל הבקר קובע את הסיבוב הזוויתי של המנוע. כל דופק קלט מייצר צעד אחד של התנועה הזוויתית. הכונן נחשב אנלוגי ממיר דיגיטלי. יש לו היגיון מובנה, אשר גורם windings מתאים להיות energized ו de-energized על ידי מצב מוצק בוררים ברצף הנדרש.

תוכן:
ישנם שלושה סוגים של מנוע דריכה על בסיס הסדרים הרוטור. הם כדלקמן:
- משתנה סטיית מנוע (VR)
משתנה ההשתנות משתנה לשני סוגים. הם ידועים כמו ערימת יחיד מנוע רתיעה משתנה רב מחסנית משתנה מנוע רתיעה.
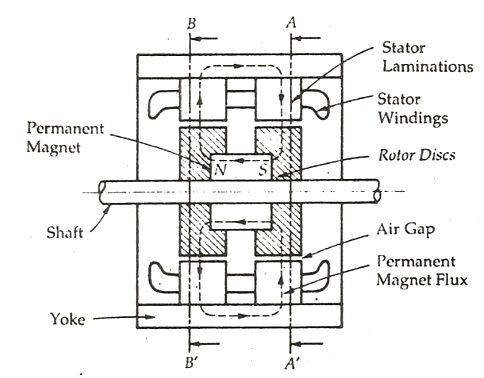
- מגנט קבוע (PM) Stepper מוטור
- מנוע היברידי היברידי (שילוב של VR ו- PM סוג)
זווית צעד ב
הגדרה: זווית צעד מוגדר כזווית אשר הרוטור של מנוע stepper נע כאשר אחד הדופק מוחל על קלט של סטאטור.
מיצוב המנוע נקבע על ידי הצעדזווית מתבטאת במעלות. הרזולוציה או מספר הצעד של המנוע הוא מספר הצעדים שהוא עושה במהפכה אחת של הרוטור. קטן זווית צעד גבוה יותר ברזולוציה של המיקום של מנוע צעד.

דיוק המיקום של האובייקטים על ידיהמנוע תלוי ברזולוציה. רזולוציה גבוהה יותר תהיה דיוק. כמה מנועים דיוק יכול לעשות 1000 צעדים במהפכה אחת עם זווית צעד של 0.36 מעלות. מנוע סטנדרטי יהיה זווית צעד של 1.8 מעלות עם 200 צעדים לכל מהפכה. הזוויות צעד שונים כמו 90, 45 ו 15 מעלות נפוצים מנועים פשוטים.
מספר השלבים יכול להשתנות בין שניים לשש. זווית צעדים קטנים ניתן להשיג באמצעות חתיכת מוט מוטות.
היתרונות של מנוע צעד
היתרונות השונים של מנוע דריכה הם כדלקמן:
- המנוע הוא פשוט בבנייה, אמין.
- במצב קיפאון, המנוע יש מומנט מלא.
- המנועים הם פחות יקרים.
- הם דורשים תחזוקה מועטה.
- מנוע צעד יש מעולה ומדויק מתחיל, עצירה היפוך התגובה.
חסרונות של מנוע צעד
החסרונות השונים של מנוע דריכה הם כדלקמן:
- המנוע משתמש יותר הנוכחי לעומת המנוע DC.
- במהירות גבוהה יותר, הערך של מומנט מפחית.
- יעילות נמוכה יותר.
- מצב התהודה עולה ודורש מיקרו דריכה.
- במהירות גבוהה, שליטה אינו אפשרי.