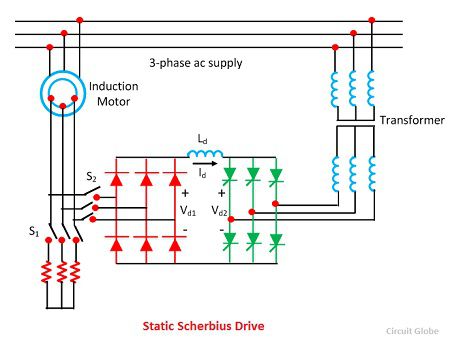
静的シェルビウス駆動
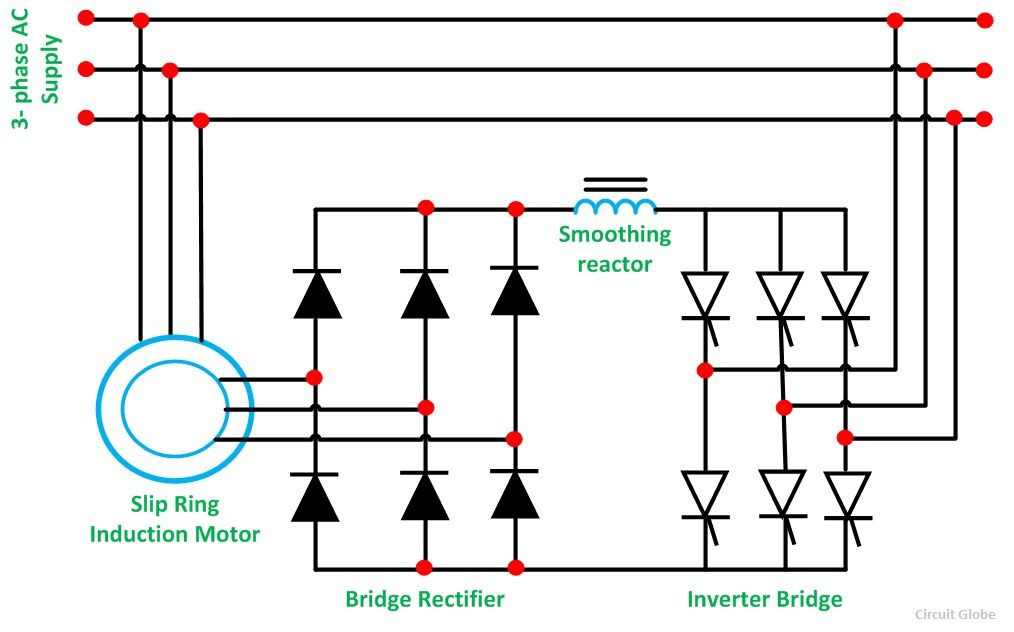
静的なScherbiusドライブはスピードを提供します同期回転数以下の巻線ロータモータの制御回転子AC電力の一部は、ダイオードブリッジによってDCに変換される。制御整流器はインバータとして機能し、DC電力をACに変換してAC電源にフィードバックします。この駆動は、注入電圧の正方向と負方向の両方に電力を流す能力を有する。これによりドライブの動作状態が向上します。
フィードバック電力は、インバータカウンタemf Vを制御することによって制御されます。d2これは、インバータの点火角を制御することによって制御されます。DCリンクインバータは、DCリンク電流Iのリップルを低減しました日。駆動装置の滑り力は動力源にフィードバックされ、それによって駆動装置の効率が向上する。
駆動入力電力はDCの差です入力電力とフィードバックされた電力。無効入力電力は、モータと入力無効電力の合計です。したがって、ドライブはその動作範囲全体にわたって力率が低くなります。
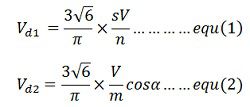
上記の式に式(1)と(2)を代入すると、

ここで、a = n / m
アルファの最大値は165ºに制限されていますインバータサイリスタの安全な転流のために。 αを90°から165°に変更すると、スリップは0から0.966αに制御できます。適切な速度範囲は、適切なαの値を選択することによって得られます。
トランスはVからの電圧を整合させるために使用されますd1 とVd2。ドライブに必要な最低速度では、Vd1 最大値Vになりますd1mそしてそれは
どこSメートル 最低速度でのスリップの値です。 αが165に制限されている場合、インバータ電圧が値Vを有するようにmが選択される。d1m αが165°のとき、すなわち

mの値は、より低いモータ速度における最大の発射角を決定する。それはまた最も低い速度で最も高い発射角と最も低い無効電力を与える。
励磁分岐を無視しているモーターの回路を考えました。 DCリンクを基準にした場合、抵抗(s R)の + Rr)は2(SR)になりますの + Rr)これはドライブの等価回路を与えます。d1 とVd2 与えられている。 R日 DCリンクインダクタの抵抗です。


回転子銅損が無視される場合

速度トルク曲線の性質は下図に示されています。

ドライブはポンプドライブの適用があります狭い範囲でのみ速度制御が必要です。このドライブは、高効率と低コストのため、中電力および大電力ファンおよびポンプドライブで広く使用されています。
静的シェルビウス駆動の動作モード
以下はスタティックシェルビウスドライブの動作モードです。
副同期モータリング - この動作モードでは、滑りおよびトルクは両方とも正であり、したがって注入電圧はロータ電流と同相である。電力は固定子に流れ込み、回転子回路にフィードバックします。
超同期モータリング - モーターの速度が同期速度、スリップは負です。このように、電圧と電流は互いに位相がずれている。電力は、ステータに流れる入力電力と共に駆動回路からロータに供給される。
準同期生成 - 副同期速度の場合、滑りは正ですがトルクは正である必要があります。動力はスリップリングを通してローターに供給されます。
超同期発電 - モーターの速度が同期速度、スリップとトルクは負になります。従って、注入電圧は回転子と同相である。機械力はシャフトによって注入され、出力電力は固定子および回転子回路から得られる。