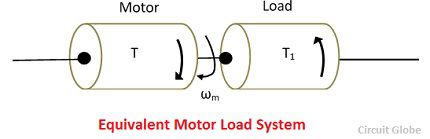
VSI Fed 유도 전동기 드라이브
정의: 전압원 인버터는 다음과 같이 정의됩니다.인버터는 DC 전원으로부터 가변 주파수를 취한다. 전압 소스 인버터의 입력 전압은 일정하게 유지되며 출력 전압은 부하와 독립적입니다. 부하 전류의 크기는 부하 임피던스의 특성에 따라 다릅니다.
아래 그림은 트랜지스터를 사용하는 전압 소스 인버터를 보여줍니다.

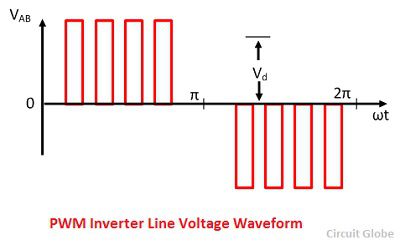
전압 소스 인버터는 자기 정류 방식을 사용합니다.MOSFET, IGBT, GTO 등의 디바이스로, 스텝핑 웨이브 인버터 또는 펄스 폭 변조로서 동작한다. 전압원 인버터가 계단 파 인버터로 동작 할 때, 트랜지스터는 T / 6의 시간차를 가지고 그 수의 순서로 스위칭된다.
각 트랜지스터는T / 2의 지속 시간. 여기서 T는 한 사이클의주기입니다. 라인 전압의 파형은 아래 그림과 같습니다. 인버터의 주파수는 T를 변화시킴으로써 변화되며, 인버터의 출력 전압은 DC 입력 전압을 변화시킴으로써 변화된다.

전원이 DC 일 때 가변 DC 입력은 DC 전원과 인버터 사이에 초퍼를 연결하여 얻을 수 있습니다.

전원이 AC 일 때, DC 입력 전압아래 그림과 같이 교류 전원과 인버터 사이에 제어 정류기를 연결하면됩니다. 콘덴서 C는 DC 링크 전압의 고조파를 필터링하여 제거합니다.
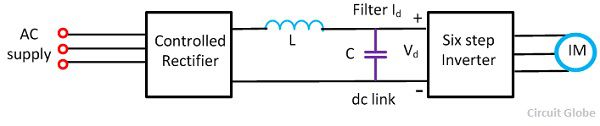
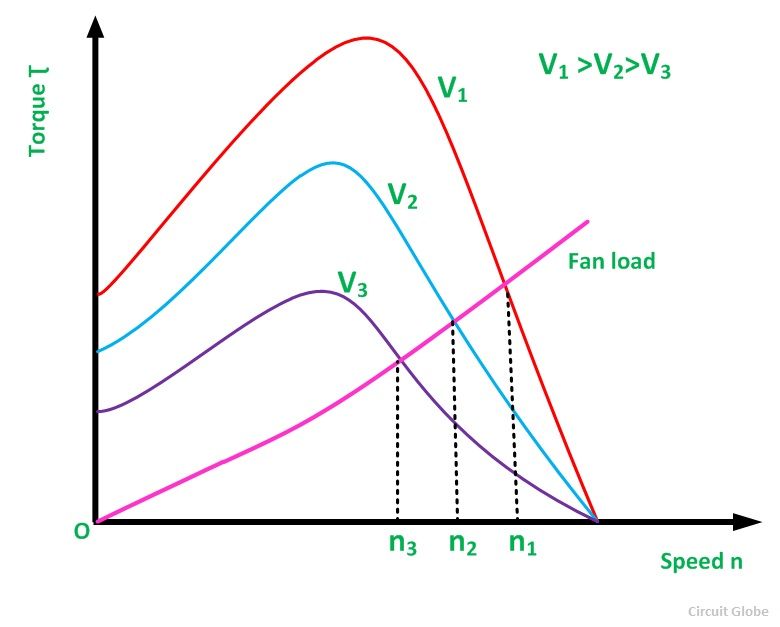
VSI 유도 전동기의 주된 단점드라이브는 출력 전압에서 저주파의 큰 고조파입니다. 고조파는 모터의 손실을 증가시키고 저속에서 로터의 갑작스런 움직임을 유발합니다.
VSI 유도 전동기 제동
다이내믹 브레이크 : 동적 제동에서, 스위치 (SW) 및제동 저항 R과 직렬로 연결된 자기 정류 스위치가 DC 링크를 통해 연결됩니다. 모터의 작동이 모터 링으로부터 제동 스위치로 전환 될 때 SW가 개방된다. DC 링크를 통해 흐르는 에너지는 커패시터를 충전하고 그 전압은 상승한다.
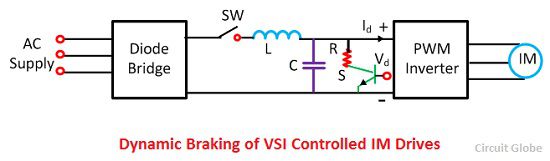
전압이 설정 값과 교차하면 스위치 S링크를 가로 질러 저항을 연결한다. 커패시터에 저장된 에너지는 저항으로 흐르고 DC 링크 전압은 감소합니다. 공칭 값으로 떨어지면 S가 열립니다. 스위치의 닫힘과 열림은 DC 링크 전압에 따라 달라지며 생성 된 에너지는 저항에서 소산되어 동적 제동을줍니다.
재생 제동 : 인버터 구동의 펄스 폭 변조의 회생 제동을 고려합시다. 운전이 모터 링에서 제동으로 바뀔 때, DC 링크 전류 I디 반전되어 소스에 에너지를 공급하는 DC 전원으로 흐릅니다. 따라서 드라이브는 이미 회생 제동 기능을 갖추고 있습니다.

회생 제동의 경우 DC 링크로 공급되는 전원을 AC 공급 장치로 전송해야합니다. 운전이 모터 링에서 제동으로 바뀔 때, DC 링크 전류 I디 반대로,하지만 V디 같은 방향으로 남는다. 따라서 회생 제동의 경우 DC 전압과 직류를 어느 방향 으로든 변환하는 컨버터가 필요합니다.
4 분면 작동
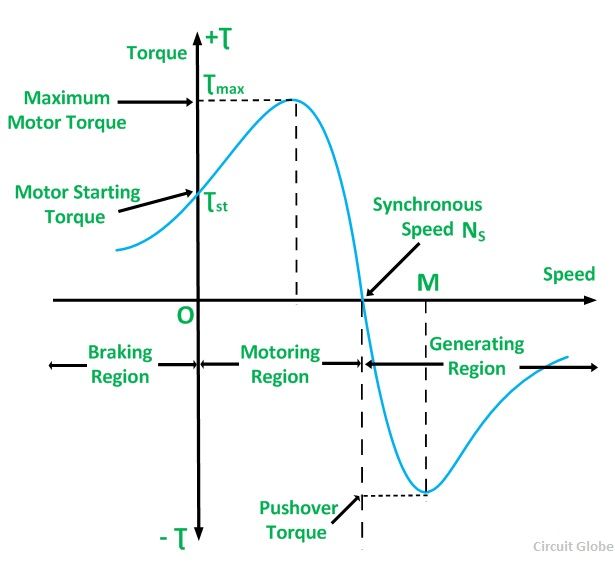
제동 능력은 4 사분면을 얻는다.드라이브의 작동. 인버터 주파수가 감소하면 동기 속도는 모터 속도보다 낮아집니다. 따라서 모터의 작동은 사분면 1 (정방향 모터 링)에서 사분면 2 (정 회전 제동)로 전환됩니다.
인버터 주파수 및 전압은 다음과 같습니다.속도가 떨어짐에 따라 점진적으로 감소하여 기계를 제로 속도에서 제동합니다. 출력 전압의 위상 시퀀스는 사이리스터의 점화 펄스를 교환함으로써 반전됩니다. 따라서, 모터의 작동은 제 2 사분면에서 제 3 사분면으로 전환됩니다 (역방향 모터 링). 인버터 주파수 및 전압이 증가하여 역방향으로 필요한 속도를 얻습니다.