Dynamikk av elektriske drifter
Når motoren roterer, belastes systemetkan rotere eller kan gå gjennom en translasjonsbevegelse. I translasjonsbevegelsen endrer kroppens posisjon fra punkt til punkt i rommet. Lastens hastighet kan være forskjellig fra motoren.
Hvis lasten har forskjellige deler, kan hastigheten deresvær forskjellig. En del av rotoren kan rotere mens andre kan gå gjennom en translasjonsbevegelse. Motorens ekvivalente lastsystem er vist i figuren under.
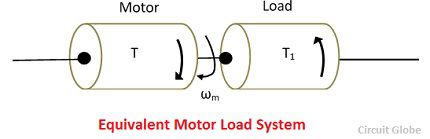
ωm - Øyeblikkelig vinkelhastighet på motorakselen, rad / sek.
T - den øyeblikkelige verdien av utviklet motormoment, N-m.
T1 - momentan verdi av lastmoment, referert til motoraksel, N-m.
Ekningen som er vist nedenfor, beskriver motorbelastningenligning.Denne ligningen gjelder for variabel inerti-stasjoner som mine, winders, hjul, stasjoner, industriroboter. I denne ligningen inkluderer lastmomentet friksjon og vindmoment for motoren.

Akselerasjonen eller deaccelerasjonen av stasjonenAvhenger hovedsakelig av om belastningsmomentet er større eller mindre enn motormomentet. Under akselerasjon leverer motoren lastmomentet sammen med et ekstra momentkomponent jdωmt / dt for å overvinne stasjonen inerti.
Stasjonene som har stor inerti måøke lastmomentet med stor mengde for å få tilstrekkelig akselerasjon. Stasjonen som krever en hurtig forbigående respons, deres motormoment skal opprettholdes til overdreven verdi og motorbelastningssystemet skal utformes med en lavere mulig treghet.
Energien forbundet med dynamisk dreiemoment lagres i form av kinetisk energi og gis av ligningen jdω2m/ Dt. Under deaccelerasjonen har det dynamiske dreiemomentet et negativt tegn. Dermed hjelper det motortilviklede dreiemoment T og opprettholder stasjonsbevegelsen ved å trekke ut energi fra lagret kinetisk energi.