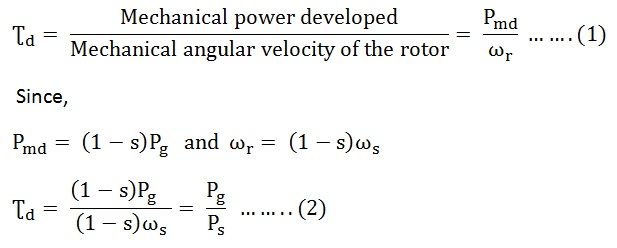
Circuitul echivalent al unui motor de inducție
Circuit echivalent a unui motor de inducție permite funcționareacaracteristicile care sunt evaluate pentru condiții de stare constantă. Un motor de inducție se bazează pe principiul inducției tensiunilor și curenților. Tensiunea și curentul sunt induse în circuitul rotorului de la circuitul statorului pentru funcționare. Circuitul echivalent al unui motor de inducție este similar cu cel al transformatorului.
Cuprins:
- Modelul circuitului stator
- Modelul circuitului rotor
- Circuitul echivalent aproximativ al unui motor de inducție
Modelul circuitului stator
Modelul circuitului stator al unui motor de inducție constă dintr-o rezistență de înfășurare în fază statorică R1, reactanță de scurgere a scurgerii în fază statorică X1 așa cum se arată în schema de circuit de mai jos.
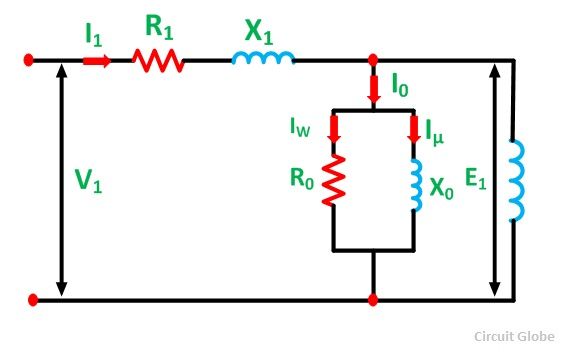
Curentul total de magnetizare I0 este considerabil mai mare în cazulmotor de inducție în comparație cu cel al unui transformator. Acest lucru se datorează reluării mai mari cauzate de spațiul de aer al motorului de inducție. După cum știm, într-un transformator, curentul de sarcină variază de la 2 la 5% din curentul nominal, în timp ce într-un motor de inducție curentul fără sarcină este de aproximativ 25 până la 40% din curentul nominal, în funcție de dimensiunea motorului. Valoarea reactanței de magnetizare X0 este, de asemenea, foarte mic într-un motor de inducție.
Modelul circuitului rotor
Atunci când se aplică o alimentare trifazată laînfășurările statorice, o tensiune este indusă în înfășurările rotorului mașinii. Cu cât este mai mare mișcarea relativă a rotorului și a câmpurilor magnetice statorice, cu atât tensiunea rotorului va fi mai mare. Cea mai mare mișcare relativă are loc în starea de staționare. Această condiție este, de asemenea, cunoscută ca rotorul blocat sau starea blocată a rotorului. Dacă tensiunea rotorului indus în această condiție este E20 atunci tensiunea indusă la orice alunecare este dată de ecuația prezentată mai jos.
Rezistența rotorului este constantă și esteindependent de alunecare. Reactanța motorului de inducție depinde de inductanța rotorului și de frecvența tensiunii și curentului din rotor.
Dacă L2 este inductanța rotorului, reactanța rotorului este dată de ecuația prezentată mai jos.
Dar, după cum știm
Prin urmare,
Unde, X20 este reactanța de oprire a rotorului.
Circuitul rotorului este prezentat mai jos.
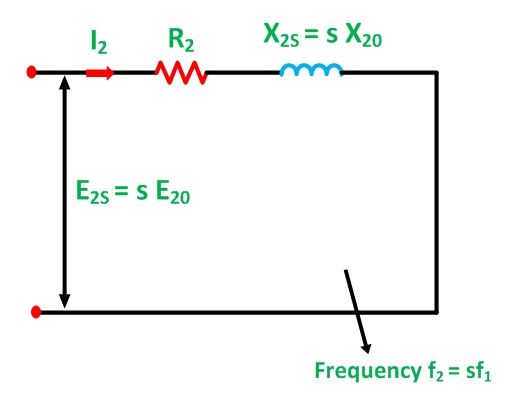
Impedanța rotorului este dată de ecuația de mai jos.

Curentul rotorului pe fază este dat de ecuația prezentată mai jos.

Aici eu2 este curentul de alunecare produs de o tensiune indusă de frecvența de alunecare sE20 care acționează în circuitul rotorului având o impedanță pe fază a (R2 + jsX20).
Acum, împărțind ecuația (5) prin alunecare, obținem următoarea ecuație.

R2 este o rezistență constantă și o reactanță variabilă de scurgere sX20. În mod similar, circuitul rotorului prezentat mai jos are o rezistență constantă la scurgere X20 și o rezistență variabilă R2/ S.
Ecuația (6) de mai sus explică secundarcircuit al unui transformator imaginar, cu un raport constant de tensiune și cu aceeași frecvență de ambele părți. Acest rotor imaginar staționar poartă același curent ca rotorul rotativ real. Acest lucru face posibilă transferarea impedanței rotorului secundar la partea statorului principal.
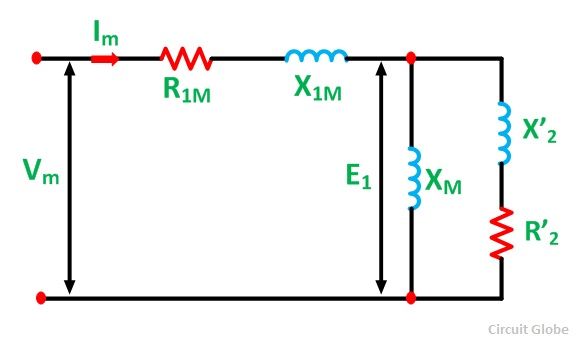
Circuitul echivalent aproximativ al unui motor de inducție
Circuitul echivalent este simplificat în continuare prin deplasarea ramificațiilor de impedanță a șuntului R0 și X0 la bornele de intrare, după cum se arată în schema de circuit de mai jos.

Impedanța dincolo de AA "este dată ca

Punerea valorii ZAA 'din ecuația (7) din ecuația (8) pe care o obținem

Prin urmare,

Curent fără sarcină I0 este

Curentul total al statorului este dat de ecuația prezentată mai jos.

Pierderile totale de bază sunt date de ecuația prezentată mai jos.
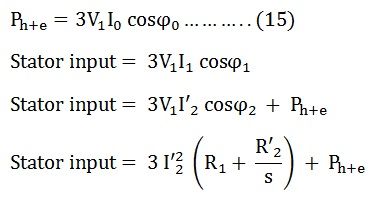
Debitul de aer per fază este dat ca


Ecuația de mai sus este ecuația cuplului unui motor de inducție. Modelul circuitului echivalent aproximativ este standardul pentru calculul tuturor performanțelor unui motor de inducție.