สเต็ปเปอร์มอเตอร์
ชื่อ สเต็ปเปอร์มอเตอร์ ตัวเองแสดงให้เห็นว่าการเคลื่อนไหวของโรเตอร์อยู่ในรูปแบบของขั้นตอนต่าง ๆ หรือขั้นตอนไม่ต่อเนื่อง เป็นที่รู้จักกันว่า Stepping Motor จำนวนพัลส์ที่ป้อนเข้าในวงจรควบคุมจะกำหนดการหมุนเชิงมุมของมอเตอร์ พัลส์อินพุตแต่ละอันสร้างขั้นตอนเดียวของการเคลื่อนที่เชิงมุม ไดรฟ์นั้นถือว่าเป็นตัวแปลงสัญญาณอนาล็อกเป็นดิจิตอล มันมีลอจิก inbuilt ซึ่งทำให้ขดลวดที่เหมาะสมที่จะลุ้นและยกเลิกการลุ้นโดยสวิตช์โซลิดสเตตในลำดับที่ต้องการ

สารบัญ:
มอเตอร์สเต็ปปิ้งมีสามประเภทตามการจัดเรียงของโรเตอร์ พวกเขามีดังนี้: -
- มอเตอร์สเต็ปเปอร์ตัวแปร
มอเตอร์ฝืดแบบปรับได้นั้นแบ่งออกเป็นสองประเภท พวกเขาเป็นที่รู้จักกันในชื่อ Reluctance motor แบบ Single stack และ Multi-stack motor reluctance motor
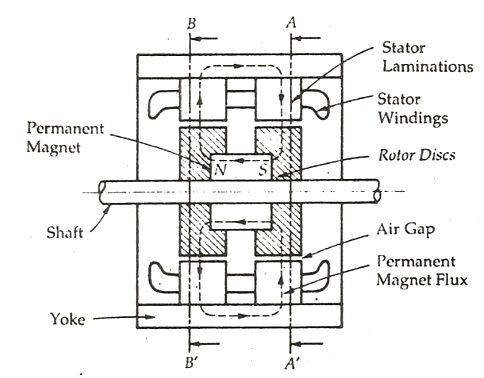
- มอเตอร์แม่เหล็กถาวร (PM)
- ไฮบริดสเต็ปเปอร์มอเตอร์ (ผสมผสานระหว่าง VR และ PM)
มุมของสเต็ปเปอร์มอเตอร์
คำจำกัดความ: มุมขั้นตอน ถูกกำหนดให้เป็นมุมที่โรเตอร์ของสเต็ปเปอร์มอเตอร์เคลื่อนที่เมื่อมีการใช้พัลส์หนึ่งตัวกับอินพุตของสเตเตอร์
การกำหนดตำแหน่งของมอเตอร์นั้นขึ้นอยู่กับขั้นตอนมุมและแสดงเป็นองศา ความละเอียดหรือจำนวนก้าวของมอเตอร์คือจำนวนก้าวที่เกิดขึ้นในการหมุนรอบเดียวของโรเตอร์ มุมที่มีขนาดเล็กกว่าความละเอียดของตำแหน่งของสเต็ปเปอร์มอเตอร์ก็จะสูงขึ้น

ความแม่นยำในการจัดตำแหน่งของวัตถุโดยมอเตอร์ขึ้นอยู่กับความละเอียด ความละเอียดที่สูงกว่าจะมีความแม่นยำมากขึ้น มอเตอร์ที่มีความแม่นยำบางตัวสามารถสร้าง 1,000 ก้าวในการปฏิวัติครั้งเดียวด้วยมุมก้าว 0.36 องศา มอเตอร์มาตรฐานจะมีมุมเป็นขั้นตอน 1.8 องศาพร้อม 200 ขั้นต่อการปฏิวัติ มุมที่หลากหลายเช่น 90, 45 และ 15 องศาเป็นเรื่องธรรมดาในมอเตอร์ธรรมดา
จำนวนขั้นตอนอาจแตกต่างกันจากสองถึงหก สามารถรับมุมขั้นตอนขนาดเล็กได้โดยใช้ชิ้นขั้วที่มีฉาก
ข้อดีของสเต็ปเปอร์มอเตอร์
ประโยชน์ต่าง ๆ ของ Stepping Motor มีดังนี้: -
- มอเตอร์นั้นเรียบง่ายในการก่อสร้างเชื่อถือได้
- ที่สภาวะหยุดนิ่งมอเตอร์มีแรงบิดเต็มที่
- มอเตอร์มีค่าใช้จ่ายน้อย
- พวกเขาต้องการการบำรุงรักษาเพียงเล็กน้อย
- มอเตอร์สเต็ปมีการตอบสนองการเริ่มต้นการหยุดและการย้อนกลับที่ดีเยี่ยม
ข้อเสียของ Stepper Motor
ข้อเสียต่าง ๆ ของสเต็ปปิ้งมอเตอร์มีดังนี้: -
- มอเตอร์ใช้กระแสไฟฟ้ามากกว่าเมื่อเปรียบเทียบกับมอเตอร์กระแสตรง
- ที่ความเร็วสูงค่าของแรงบิดจะลดลง
- ประสิทธิภาพลดลง
- เงื่อนไขการสั่นพ้องเกิดขึ้นและต้องมีการเหยียบแบบไมโคร
- ที่ความเร็วสูงการควบคุมเป็นไปไม่ได้