Elektrikli Tahriklerde Yük Denkleştirme
Tanım: Yük dengeleme, düzleştirme işlemidir.dalgalı yük. Dalgalanan yük, en yüksek aralık sırasında beslemeden ağır akım çeker ve ayrıca ekipmanın zarar görmesine bağlı olarak sistemde büyük bir voltaj düşmesine neden olur. Yük dengelemede, enerji hafif yükte depolanır ve bu enerji pik yük gerçekleştiğinde kullanılır. Böylece, beslemeden gelen elektrik gücü sabit kalır.
Yük dalgalanması çoğunlukla bazısürücüler. Örneğin, bir pres makinesinde, kısa bir süre için büyük bir tork gerekir. Aksi takdirde, tork sıfırdır. Diğer örneklerden bazıları bir haddehane, pistonlu pompa, planlama makineleri, elektrikli çekiç vb.
Elektrikli tahriklerde yük dalgalanması meydana gelirgeniş Elektrikli sürücülere en yüksek tork talebini sağlamak için motor yüksek derecelere sahip olmalı ve aynı zamanda motor beslemeden darbe akımı alacaktır. Darbe akımının genliği, hatta bağlı diğer yükü etkileyen bir hat voltaj dalgalanmasına neden olur.
Yük Denkleştirme Yöntemi
Yük dalgalanması sorunu aşılabilirvolan kullanılarak. Uçan tekerlek, geri dönüşü olmayan tahriklerde bir motor miline monte edilir. Değişken hızlı ve geri döndürülebilir sürücüde, sürücünün geçici süresini artıracağı için motor miline bir volan monte edilemez. Motor, motor jeneratör setinden beslenirse, motor jeneratör şaftı üzerine monte edilmiş volan ve dolayısıyla kaynak üzerindeki yükü dengeler ancak motordaki yükü eşitlemez.
Yük hafif olduğunda, volan hızlanırve arzdan çekilen fazla enerjiyi depolar. Tepe yükü sırasında, uçan tekerlek, depolanan enerjiyi, tedarik enerjisiyle birlikte yüke yavaşlatır ve verir. Bu nedenle güç sabit kalır ve yük talebi azalır.
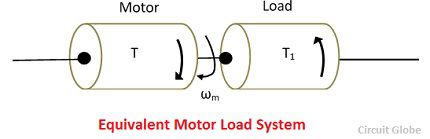
Yük dengeleme için gerekli uçan tekerleğin atalet momenti aşağıdaki şekilde hesaplanır. Aşağıdaki şekilde gösterildiği gibi lineer motor hız tork eğrisini göz önünde bulundurun.





Sabit durumda çalışırken, bir devrin sonundaki motor torku bir devrin başlangıcındaki ile aynı olacaktır’ = tl, T = tmin. (8) denkleminde yer değiştirme vermesi




Not: Atalet momenti, dönen gövdenin açısal tıkanmasıdır. Kütlenin ürünü ve dönme ekseninden belli bir mesafedeki karedir.