Перемінний кроковий двигун небажаності
Принцип дії Перемінний кроковий двигун небажаності ґрунтується на властивості ліній потоку, якізахоплюють низький шлях відмови. Статор і ротор електродвигуна вирівняні таким чином, що магнітне затягування є мінімальним. Існує два типи шагового двигуна із змінною небажаністю. Вони такі
- Мотор з перехідною стійкістю до одного стека
- Мульти-стек змінного двигуна небажаності
Робота змінного шагового двигуна небажання
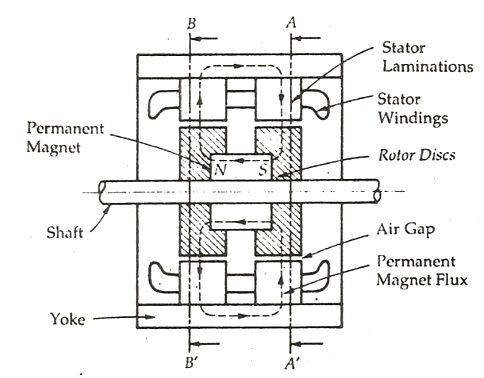
Чотири-фазний або (4/2 полюс) кроковий двигун із змінною недієздатністю, показаний нижче. Тут (полюс 4/2) означає, що статор має чотири полюси, а ротор має два полюси.

Чотири фази A, B, C і D підключені до джерела постійного струму за допомогою напівпровідника, комутаторів SA, SB, SC і SD відповідно, як показано на малюнку вище. Фазові обмотки статора включені в послідовність A, B, C, D, A. Ротор вирівнюється з віссю фази А, оскільки обмотка А піддається напрузі. Ротор стабільний у цьому положенні і не може рухатися, поки фаза А не буде знеструмлена.
Тепер фаза B збуджується, а фаза А -відключено. Ротор рухається на 90 градусів за годинниковою стрілкою, щоб вирівнятися з результуючим полем повітряного зазору, який лежить вздовж осі фази B. Так само фаза C піддається напрузі, а фаза B відключається, і ротор знову рухається в 90 градусів, щоб вирівняти. сама з осі фази
Таким чином, як фази збуджуються в порядку, якA, B, C, D, A, ротор рухається на 90 градусів на кожному кроці переходу за годинниковою стрілкою. Ротор завершує один оборот у 4 кроки. Напрямок обертання залежить від послідовності перемикання фази і не залежить від напрямку струму, що протікає через фазу. Таким чином, напрямок може бути зворотним шляхом зміни послідовності фаз типу A, D, C, B, A.
Величина кута кроку двигуна змінної індукції наведена як
Де,
- α - кут нахилу
- ms - кількість статорних фаз
- Nr - кількість зубів ротора
Кут кроку виражається, як показано нижче.

Де, NS є полюси статора
Кут кроку може бути зменшений з 90 градусів до 45 градусів за годинниковою стрілкою шляхом збудження фази в послідовності A, A + B, B, B + C, C, C + D, D, D + A, A.
Аналогічно, якщо послідовність змінюється на зворотний бік A, A + D, D, D + C, C, C + B, B, B + A, A, то ротор обертається на кут нахилу 45 градусів у напрямку проти годинникової стрілки.
Тут, (A + B) означає, що фазові обмотки A і Bобидва живлять разом. Результатом поля є посередині двох полюсів. він робить кут 45 градусів з віссю полюса в напрямку за годинниковою стрілкою. Цей спосіб перенесення збудження з однієї фази на іншу відомий як Microstepping.By, використовуючи кроковий двигун, більш низькі значення кута кроку можуть бути отримані з номерами полюсів на статорі.
Розглянемо 4-фазний (8/6-полюсний) одноваговий двигун з змінним навантаженням, показаний на малюнку нижче.

Протилежні полюси з'єднані послідовноформування 4 фаз. Ротор як 6 полюсів. Тут я розглядаю лише фазу А, щоб зробити з'єднання простим. Коли котушка АА 'збуджується, зубці 1 і 4 ротора розташовані уздовж осі обмотки фази А. Таким чином, ротор займає положення, як показано на малюнку (а).
Тепер, фаза А знеструмлена, і фазаобмотка B під напругою. Зубці 3 і 6 ротора орієнтовані вздовж осі фази В. Ротор переміщує крок фазового кута 15 градусів за годинниковою стрілкою. Далі, фаза B знеструмлюється, і обмотка C збуджується. Ротор знову переміщується на 15⁰ фазовий кут.
Наступні послідовності A, B, C, D, A ічотири кроки обертання завершені, і ротор рухається на 60 градусів за годинниковою стрілкою. Для одного повного обороту ротора потрібно 24 кроки. Таким чином, будь-який необхідний кут нахилу може бути отриманий при виборі різних комбінацій числа зубців ротора і котушок статора.