Tehokertoimen mittari
Määritelmä: Tehokertoimen mittari toimenpiteet ja tehokerroin a siirtojärjestelmä. Tehokerroin on jännitteen ja virran välisen kulman kosinus. Tehokertoimen mittari määrittää kuormitustyypit käyttämällä linjaa, ja myös laskee tappiot tapahtuu.
Siirtolinjan tehokerroin onmitataan jakamalla jännitteen ja virran tuote teholla. Ja jännitevirran ja tehon arvo määritetään helposti volttimittarilla, ampeerimittarilla ja wattimittarilla. Tämä menetelmä antaa suuren tarkkuuden, mutta se vie aikaa.
Siirtolinjan tehokerroin onmuuttunut jatkuvasti ajan myötä. Siksi on tärkeää ottaa nopea lukeminen. Tehokertoimen mittari suorittaa suoran lukemisen, mutta se on vähemmän tarkka. Tehokertoimen mittarista saatu lukema riittää moniin tarkoituksiin tarkkuuden testaamiseksi.
Tehokerroinmittarissa on liikkuva järjestelmäkutsutaan osoittimeksi, joka on tasapainossa kahden vastakkaisen voiman kanssa. Täten tehokerroinmittarin osoitin pysyy samassa asennossa, jossa se on käytössä sen katkaisun yhteydessä.
Tehokertoimen mittarit
Tehokertoimen mittari on kahdenlaisia. He ovat
- Electrodynamometer
- Yksivaiheinen elektrodynamometri
- Kolme vaihetta elektrodynamometri
- Liikkuva rautatyyppimittari
- Pyörivä rauta-magneettikenttä
- Vaihtelevan kentän lukumäärä
Erilaisia tehokertoimen mittareita selitetään jäljempänä yksityiskohtaisesti.
Yksivaiheinen elektrodynamometrin tehokerroin
Yhden vaiheen rakentaminenelektrodynamometri on esitetty alla olevassa kuvassa. Mittarissa on kiinteä kela, joka toimii nykyisenä kelana. Tämä kela on jaettu kahteen osaan ja kantaa testattavaa virtaa. Kelan magneettikenttä on suoraan verrannollinen kelan läpi kulkevaan virtaan.
Mittarissa on kaksi identtistä painekelaa A jaB. Molemmat kelat on käännetty karaan. Painekelalla A ei ole induktiivista vastusta, joka on kytketty sarjaan piirin kanssa, ja kelalla B on erittäin induktiivinen kela, joka on kytketty sarjaan piirin kanssa.

Mittarissa on kaksi vääntömomenttia, joka vaikuttaakela A ja toinen on kelalla B. Käämit on järjestetty niin, että ne ovat suunnassa päinvastaisia. Osoitin on tasapainossa, kun vääntömomentit ovat yhtä suuret.
Kelaan A vaikuttava vääntömomentti annetaan arvona
Mmax - kelojen välinen keskinäisen induktanssin maksimiarvo.
Kelaan B vaikuttava kääntömomentti ilmaistaan arvona
Suurimman keskinäisen induktanssin arvo on sama molempien poikkeamayhtälöiden välillä.

Kolmivaiheinen elektrodynometrin tehokerroin
Kolmivaiheisen mittarin rakenne onalla olevassa kuvassa. Elektrodynamometri on hyödyllinen vain tasapainotetulle kuormitukselle. Liikkuva kela on sijoitettu 120 asteen kulmaan. Ne on kytketty syöttöpiirin eri vaiheisiin. Molemmilla keloilla on sarjavastus.
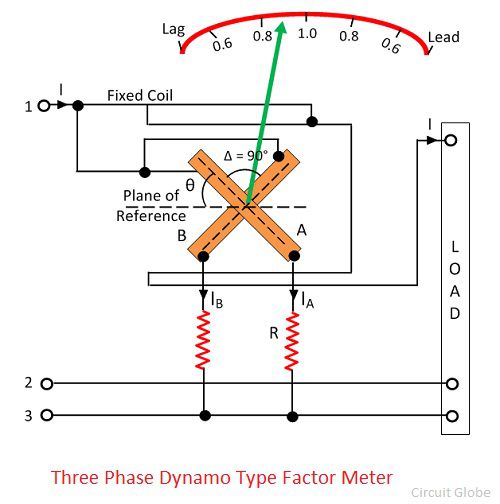
Kolmivaiheisen elektrodynaamisen mittarin vaihekaavio on esitetty alla olevassa kuvassa.
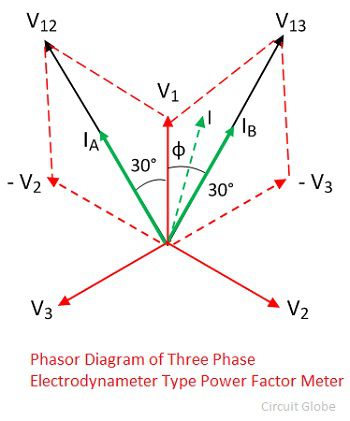
θ - kulmakulma referenssitasosta.
Kelaan A vaikuttava momentti on


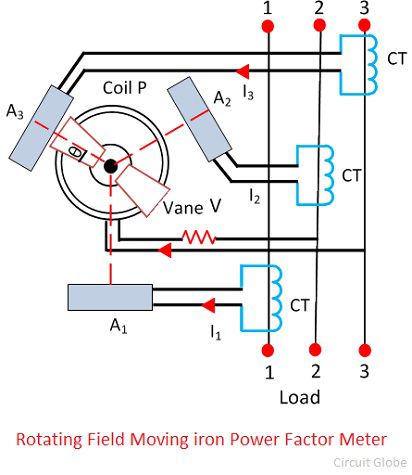
Liikkuva rauta-tehokertoimen mittari
Liikkuva rauta-laite on jaettu kahteen luokkaan. Ne ovat pyörivä magneettikenttä joihinkin vuorotteleviin kenttiin.
A. Pyörivä kenttävoimakertoimen mittari - Seuraavat ovat olennainen piirrepyörivä magneettikenttä. Tehokerroinmittarissa on kolme kiinteää kelaa, ja niiden akselit ovat 120 ° siirtyneet toisistaan. Akselit leikkaavat toisiaan. Kelat on kytketty kolmivaiheiseen syöttöön virtamuuntajan avulla.
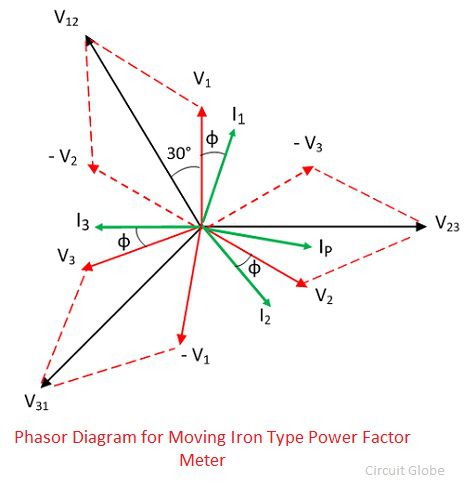
Tehokerroinmittarin vaihekaavio on esitetty kuvassa.

Liikkuvan raudan tehon edut Power Factor
- Mittari tarvitsee suuren käyttövoiman verrattuna elektrodynamometrin tyyppiseen mittariin.
- Liikkuvien rauta-instrumenttien kelat kiinnitetään pysyvästi.
- Asteikon alue ulottuu jopa 360º.
- Mittarin rakenne on vankka ja yksinkertainen.
- Liikkuva rauta-instrumentti on halpa verrattuna elektrodynamiikkaan.
Rauta-instrumentin siirtämisen haitat
- Häviö tapahtuu mittarin rautaosassa. Häviöt riippuvat mittarin kuormituksesta ja taajuudesta.
- Mittarilla on alhainen tarkkuus.
- Mittarin kalibrointi vaikuttaa syöttötaajuuksien, jännitteen ja aaltomuotojen vaihteluun jne.
Tehokertoimen mittaria käytetään tasapainotetun kuormituksen tehokertoimen mittaamiseen.








