Stabilna stabilność stanu systemu zasilania
Definicja: Stabilność stanu ustalonego definiuje się jakozdolność systemu elektroenergetycznego do utrzymania stanu początkowego po małej przerwie lub do osiągnięcia stanu bardzo zbliżonego do początkowego, gdy zakłócenia są nadal obecne. Stabilność stanu ustalonego jest bardzo ważna w planowaniu i projektowaniu systemu energetycznego, w rozwoju specjalne automatyczne urządzenie sterujące, uruchamiające nowe elementy systemu lub modyfikujące jego nowy stan pracy.
Ważne jest oszacowanie granicy stanu ustalonegodo analizy systemu elektroenergetycznego. Analiza systemu elektroenergetycznego obejmuje sprawdzenie systemu elektroenergetycznego w określonym stanie ustalonym, określenie jego granic stabilności i jakościową ocenę stanu nieustalonego. Ocenia także wybór typu układu wzbudzenia i jego elementów sterujących, trybów sterowania, parametru układu wzbudzenia i sterowania automatyki.
Wybór stabilności jest dokonywany przezwymagania dotyczące granicy stabilności lub jakości energii elektrycznej w stanie ustalonym lub podczas stanu nieustalonego. Limit stanu ustalonego odnosi się do maksymalnego przepływu mocy przez określony punkt bez powodowania utraty stabilności, gdy moc jest zwiększana bardzo stopniowo.
Gdy wszystkie maszyny w jednej części pracują razem,następnie są traktowane jako jedna duża maszyna połączona w tym momencie. Nawet jeśli maszyny nie są podłączone do tej samej szyny zbiorczej i są oddzielone dużą reaktancją, są również uważane za dużą maszynę. Duży system w systemie energetycznym ma zawsze mieć stałe napięcie i jest traktowany jako nieskończona magistrala.
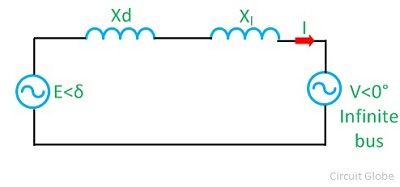
Rozważmy układ składający się z generatora G, linii transmisyjnej i silnika synchronicznego M w postaci obciążenia.



Powód niestabilnego systemu
Rozważmy silnik synchroniczny podłączony donieskończona szyna zbiorcza i działająca ze stałą prędkością. Moc wejściowa jest równa mocy wyjściowej plus straty. Jeśli do silnika zostanie dodany najmniejszy przyrost obciążenia wału, wówczas moc silnika wzrasta, a moc wejściowa silnika pozostaje niezmieniona. Tym samym moment obrotowy silnika mający tendencję do opóźniania go i jego prędkość chwilowo spada.
Opóźnienie momentu obrotowego zmniejsza silnikprędkość, kąt fazowy między wewnętrznym napięciem silnika a napięciem w układzie wzrasta, dopóki moc elektryczna nie będzie równa mocy wyjściowej plus straty.
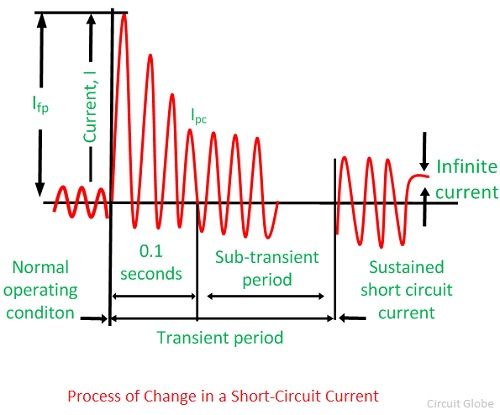
Podczas przejściowego przedziału mocy,moc elektryczna doprowadzana do silnika jest mniejsza niż obciążenie mechaniczne, wymagana nadwyżka mocy jest dostarczana przez zmagazynowaną energię w układzie obrotowym. Silnik oscyluje wokół równowagi i może w końcu albo odpocząć, albo utracić synchronizm. System utracił również swoją stabilność, gdy przykłada się duże obciążenie lub gdy obciążenie jest przykładane zbyt gwałtownie na maszynę.
Poniższe równanie pokazuje maksymalną mocsilnik może się rozwijać. Wartość obciążenia można uzyskać tylko wtedy, gdy kąt mocy (δ) = kąt obciążenia (β). A obciążenie może wzrosnąć, dopóki ten warunek nie zostanie osiągnięty. Po tym warunku, jeśli obciążenie wzrośnie, maszyna straci synchronizację i będzie potrzebna nadmierna moc.
Nadmiar energii będzie pochodził z magazynowanej energiiukładu obrotowego, a prędkość spada. Większa i większa moc staje się coraz mniejsza, kąt będzie się rozwijał, aż silnik się zatrzyma.
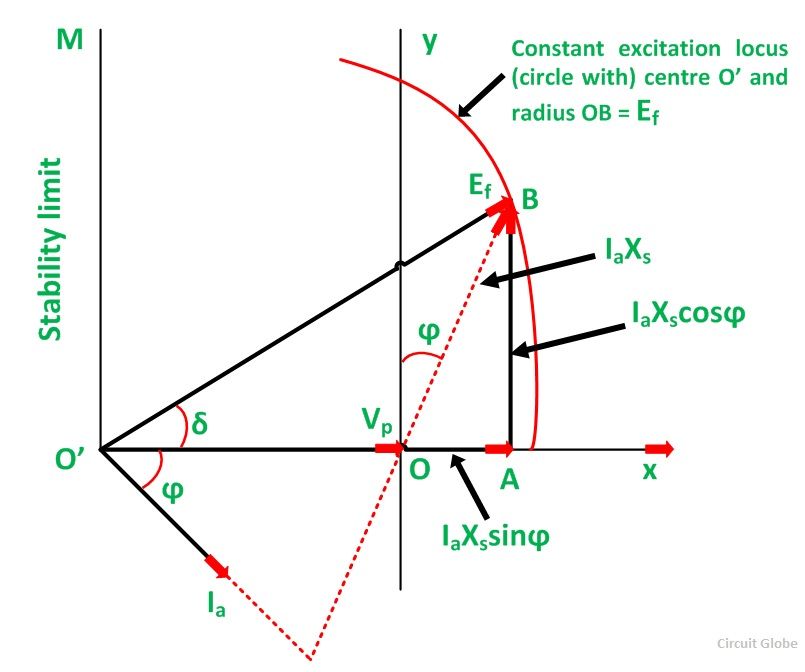
Różnica między silnikiem a silnikiemmoc generatora opracowana dla dowolnej wartości δ jest równa stratom linii. Jeśli rezystancja i dopuszczalność bocznika linii są pomijalne, otrzymujemy następujące wyrażenie dla mocy przenoszonej między alternatorem a silnikiem.

Vsol - napięcie generatora
VM - napięcie silnika
δ - Kąt obciążenia
PM - Moc silnika
Psol - Moc silnika
Pmax - maksymalna moc
Metody poprawy limitu stanu ustalonego
Maksymalna moc przenoszona międzyalternator, a silnik jest wprost proporcjonalny do iloczynu wewnętrznego emfa maszyn i odwrotnie proporcjonalny do reaktancji liniowej. Limit stanu ustalonego zwiększa się z dwóch powodów;
- Poprzez zwiększenie wzbudzenia generatora lub silnika lub obu - Wzbudzenie zwiększa wewnętrzny emf iw konsekwencji zwiększa się maksymalna moc przenoszona między dwoma maszynami. Ponadto wraz ze wzrostem wartości wewnętrznych pól elektromagnetycznych zmniejsza się kąt obciążenia δ.
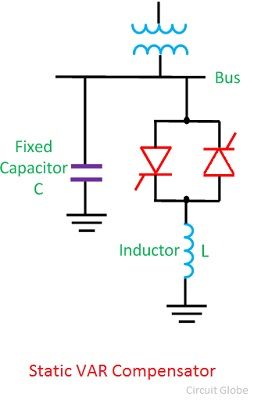
- Zmniejszenie transferu Reaktywność - Reaktancja jest zmniejszana przez zwiększanierównoległa linia między punktami transmisji. Wykorzystanie przewodnika wiązki jest inną metodą zmniejszania reaktancji linii. Reaktancję można również zmniejszyć, używając pojemności szeregowo z linią.
Kondensator szeregowy jest stosowany tylko w liniach EHV, aby zwiększyć transfer mocy i jest bardziej ekonomiczny w odległości ponad 350 km.