Stepper Motor
Nimi Stepper Motor itse osoittaa, että roottorin liike oneri vaiheiden tai erillisten vaiheiden muodossa. Se tunnetaan myös nimellä Stepping Motor. Ohjainpiiriin syötettyjen pulssien lukumäärä määrittää moottorin kulman pyörimisen. Jokainen tulopulssi tuottaa yhden askeleen kulmaliikkeestä. Taajuusmuuttajaa pidetään analogisena digitaalimuuntimena. Siinä on sisäänrakennettu logiikka, joka saa aikaan sopivat käämit jännitteettömiksi ja jännitteettömiksi kytkimillä tarvittavassa järjestyksessä.

Sisällys:
Roottorijärjestelyihin perustuvia askelmoottoreita on kolme. Ne ovat seuraavat: -
- Muuttuva reluktiivisuus (VR) Stepper Motor
Muuttuva reluktanssi-moottori on jaettu kahteen tyyppiin. Niitä kutsutaan yksivaiheisiksi muuttuviksi reluktanssimoottoreiksi ja Multi-stack-vaihtelevaksi reluktanssi-moottoriksi.
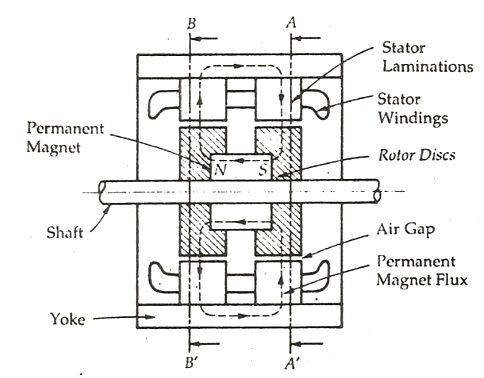
- Pysyvä magneetti (PM) Stepper Motor
- Hybridi-askelmoottori (VR- ja PM-tyypin yhdistelmä)
Askelkulma askelmoottorissa
Määritelmä: Askelkulma on määritelty kulmaksi, jossa askelmoottorin roottori liikkuu, kun yksi pulssi syötetään staattorin tuloon.
Moottorin sijoittamisesta päättää vaihekulma ja ilmaistaan asteina. Moottorin resoluutio tai askelnumero on se, kuinka monta vaihetta se tekee yhdessä roottorin kierrossa. Pienempi askelkulma on suurempi kuin askelmoottorin paikannus.

Objektien sijoittamisen tarkkuusmoottori riippuu resoluutiosta. Korkeampi resoluutio on tarkkuus. Jotkut tarkkuusmoottorit voivat tehdä 1000 vaihetta yhdellä kierroksella porraskulmalla 0,36 astetta. Standardimoottorin porraskulma on 1,8 astetta 200 askelta kierrosta kohti. Eri askelkulmat kuten 90, 45 ja 15 astetta ovat yleisiä yksinkertaisissa moottoreissa.
Vaiheiden lukumäärä voi vaihdella kahdesta kuuteen. Pienet askelkulmat voidaan saada käyttämällä uritettuja napakappaleita.
Stepper Motorin edut
Askelmoottorin erilaiset edut ovat seuraavat: -
- Moottori on rakenteeltaan yksinkertainen, luotettava.
- Pysäytysolosuhteissa moottorissa on täysi vääntömomentti.
- Moottorit ovat halvempia.
- Ne vaativat vähän huoltoa.
- Askelmoottorilla on erinomainen ja tarkka käynnistys-, pysäytys- ja peruutusvaste.
Stepper Motorin haitat
Askelmoottorin erilaiset haitat ovat seuraavat: -
- Moottori käyttää enemmän virtaa kuin DC-moottori.
- Suuremmalla nopeudella vääntömomentin arvo pienenee.
- Pienempi tehokkuus.
- Resonanssitila syntyy ja vaatii mikropysähdyksen.
- Suurella nopeudella ohjaus ei ole mahdollista.