בקרת מהירות של מנוע DC: בקרת התנגדות Armature ושליטה שטף שדה
מנוע dc ממיר את הכוח מכני לתוךחשמל DC. אחד המאפיינים החשובים ביותר של מנוע DC הוא כי המהירות שלהם יכול בקלות להיות שליטה על פי דרישה באמצעות שיטות פשוטות. סוג כזה של שליטה בלתי אפשרי במנוע AC.
הרעיון של מהירות הרגולציה שונהמן בקרת מהירות. ב ויסות מהירות, את המהירות של המנוע משתנה באופן טבעי ואילו המנוע dc את המהירות של המנוע משתנה ידנית על ידי המפעיל או על ידי איזה מכשיר בקרה אוטומטית. ה מהירות של מנוע DC ניתנת על ידי היחס המוצג להלן.
המשוואה (1) כי המהירות תלויה במתח ההיצע V, התנגדות מעגל הארמטורה Rא ואת השטף השדה φ, המיוצר על ידי זרם השדה.

תוכן:
עבור שליטה על המהירות של מנוע DC,וריאציה במתח, התנגדות armature השטף השדה נלקח בחשבון. ישנן שלוש שיטות כלליות של בקרת מהירות של מנוע DC. הם כדלקמן.
- וריאציה של התנגדות במעגל armature.
שיטה זו נקראת התנגדות ארמטורה או שליטה ריאוסטטית. - שינוי בשטף שדה
שיטה זו ידועה בקרת שטף שדה. - שינוי במתח יישומי
שיטה זו ידועה גם בשם בקרת מתח ארמטורה.
הדיון מפורט על השיטה השונים של שליטה על המהירות ניתן להלן.
בקרת התנגדות ארמטורה של מנוע DC
שאנט מוטור
דיאגרמת החיבור של מנוע Shunt של שיטת בקרת ההתנגדות של armature מוצגת להלן. בשיטה זו, משתנה משתנה Rה הוא לשים במעגל armature. וריאציה בהתנגדות המשתנה אינה משפיעה על השטף כאשר השדה מחובר ישירות לאספקת החשמל.


עכשיו, בואו ניקח בחשבון תרשים החיבור של בקרת מהירות של מנוע סדרה DC על ידי שיטת בקרת התנגדות armature.

ה המאפיין המהיר הנוכחי של מנוע סדרה מוצג באיור להלן.

החסרונות של התנגדות ארמטורה שיטת בקרה
- כמות גדולה של חשמל מבוזבזת בהתנגדות החיצונית Re.
- בקרת התנגדות ארמטורה מוגבלת כדי לשמור על המהירות מתחת למהירות הרגילה של המנוע ולהגביר את המהירות מעל לרמה הרגילה לא אפשרי בשיטה זו.
- עבור ערך נתון של התנגדות משתנה, הפחתת המהירות אינה קבועה אך משתנה עם עומס המנוע.
- שיטה זו בקרת מהירות משמש רק עבור מנועים קטנים.
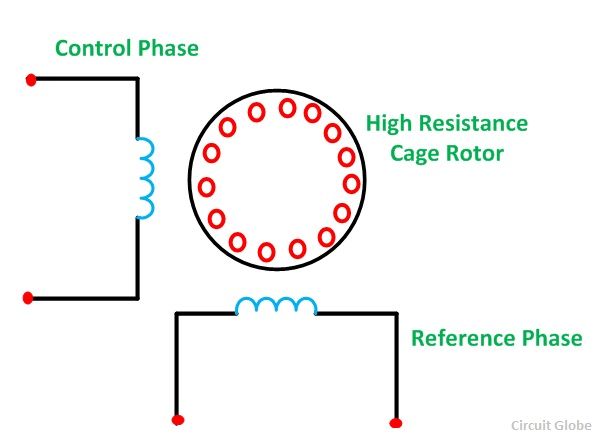
שיטת בקרת שטף של מנוע
השטף מיוצר על ידי זרם השדה. לפיכך, בקרת המהירות בשיטה זו מושגת על ידי שליטה על זרם השדה.
שאנט מוטור
במנוע Shunt, הנגד המשתנה Rג מחובר בסדרה עם סליל שדה shunt כפי שמוצג באיור להלן. זה נגד Rג ידוע בשם Shunt שדה הרגולטור.
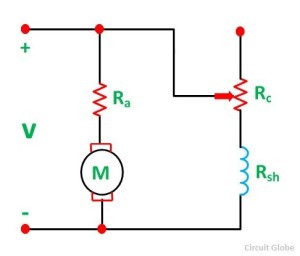
החיבור של RC בשדה מפחית אתשדה הנוכחי, ולכן השטף הוא גם מופחת. הפחתה זו של השטף מגבירה את המהירות, ולכן המנוע פועל במהירות גבוהה מהמהירות הרגילה. לכן, שיטה זו משמשת כדי לתת מהירות המנוע מעל רגיל או לתקן את הנפילה של מהירות בגלל העומס.
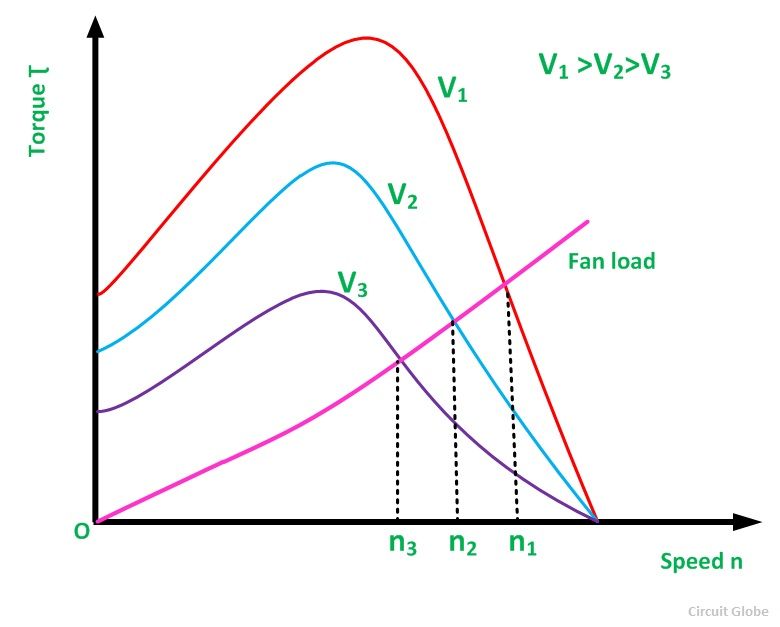
ה עקומת המהירות עבור מנוע shunt מוצג להלן.

במנוע סדרה, הווריאציה בזרם השדה נעשית על ידי שיטה אחת, כלומר על ידי ממיר או על ידי שדה שדה טפח.
באמצעות דיברטר
התנגדות משתנה Rד מחובר במקביל לשדות הסדרה, כפי שמוצג באיור שלהלן.

בקרת שדה Tapped
השיטה השנייה המשמשת מנוע סדרה עבור וריאציה בתחום הנוכחי הוא על ידי טפח שליטה שדה. דיאגרמת החיבור מוצגת להלן.


היתרונות של בקרת שטף השדה
להלן היתרונות של שיטת בקרת השטף.
- שיטה זו היא קלה ונוחה.
- כמו שדה shunt הוא קטן מאוד, אובדן החשמל בשדה shunt הוא גם קטן.
את השטף לא ניתן בדרך כלל להגביר מעבר שלהערכים נורמליים בגלל הרוויה של הברזל. לכן, בקרת מהירות על ידי השטף מוגבל היחלשות של השדה, אשר נותן עלייה במהירות. שיטה זו חלה רק על טווח מוגבל, כי אם השדה נחלש יותר מדי, יש אובדן יציבות.
ארמטורה בקרת מתח של מנוע DC
בשיטת בקרת מתח הארמוטור בקרת המהירות מושגת על ידי שינוי המתח המיושם במחושל המתפתל של המנוע. שיטה זו בקרת מהירות ידוע גם בשם שיטת וורד לאונרד, אשר נדון בפירוט תחת הנושא וורד לאונרד שיטה או ארמטורה מתח בקרת. הקישור מופיע בהמשך.
ראה גם: וורד לאונרד שיטת בקרת מהירות של מנוע DC או ארמטורה מתח הבקרה