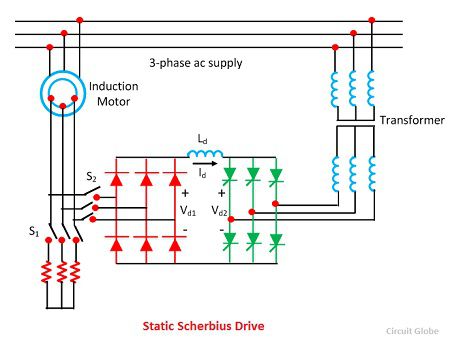
Statiskais Scherbius disks
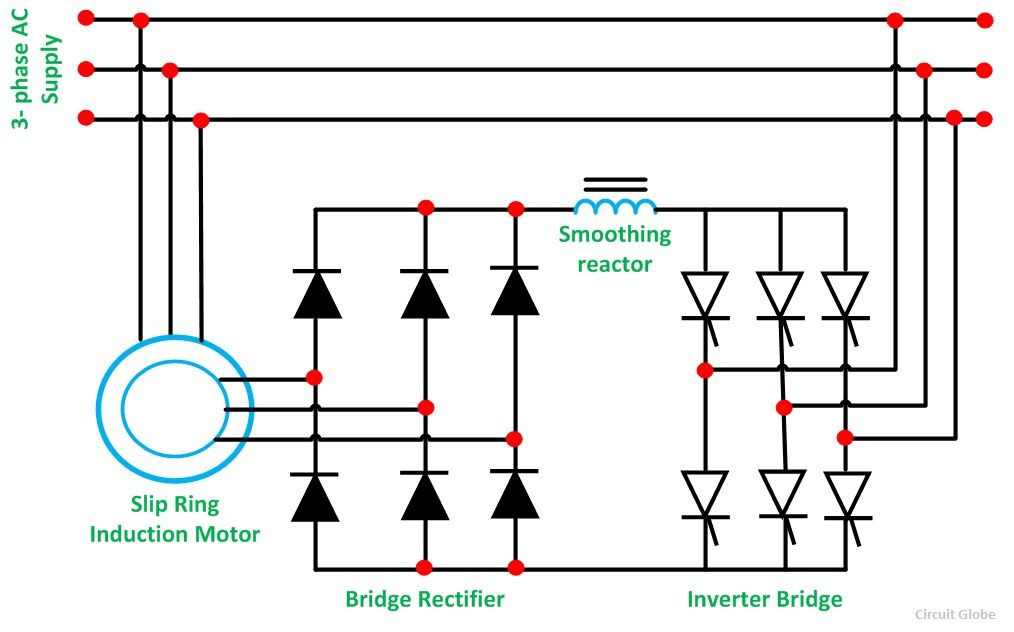
Statiskais Scherbius disks nodrošina ātrumubrūces rotora motora vadība zem sinhronā ātruma. Rotora maiņstrāvas jaudu pārveido par DC ar diode tiltu. Kontrolētais taisngriezis darbojas kā invertors un pārveido līdzstrāvas strāvu atpakaļ AC un padod to atpakaļ maiņstrāvas avotam. Šim diskam ir iespēja plūsmu strādāt gan pozitīvajā, gan negatīvajā virzienā. Tas palielina piedziņas darba stāvokli.
Atgriezenisko jaudu kontrolē, kontrolējot invertora skaitītāja emf Vd2, kas tiek kontrolēts, kontrolējot invertora aizdedzes leņķi.d. Piedziņas slīdes jauda tiek atgriezta avotā, kā rezultātā palielinās piedziņas efektivitāte.
Dzinēja ieejas jauda ir DC atšķirībaieejas jauda un strāvas padeve atpakaļ. Reaktīvā ieejas jauda ir motora un ieejas reaktīvās jaudas summa. Tādējādi piedziņai ir slikts jaudas koeficients visā darbības diapazonā.
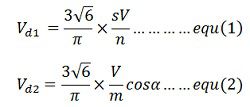
Aizstājot vienādojumu (1) un (2) iepriekš minētajā vienādojumā, mēs saņemam

kur a = n / m
Maksimālā alfa vērtība ir ierobežota līdz 165ºdrošai invertora tiristora komutācijai. Slipu var kontrolēt no 0 līdz 0,966α, kad α mainās no 90º līdz 165º. Attiecīgo ātruma diapazonu var iegūt, izvēloties atbilstošo α vērtību.
Transformatoru izmanto, lai saskaņotu spriegumu no Vd1 un Vd2. Pie zemākā ātruma, kas nepieciešams no piedziņas, Vd1 būs maksimālā V vērtībad1m, un to sniedz
Kur irm ir slīdes vērtība zemākajā ātrumā. Ja α ir ierobežots līdz 165, m ir izvēlēts tāds, ka invertora spriegumam ir V vērtībad1m ja α ir 165º, t.i.

M vērtība nosaka augstāko apdedzināšanas leņķi pie zemāka motora apgriezienu skaita. Tas arī nodrošina vislielāko degšanas leņķi un zemāko reaktīvo jaudu pie zemākā ātruma.
Uzskatīja motora ķēdi, kas ignorē magnētisko zari. Atsaucoties uz līdzstrāvas pieslēgumu, pretestība (sRs + Rr) būs 2 (sR)s + Rr). Tas dod ekvivalentu piedziņas ķēdi, kur Vd1 un Vd2 tiek doti. Rd ir DC saites induktora pretestība.


Ja rotora vara zudums ir atstāts novārtā

Ātruma griezes momenta līknes raksturs ir parādīts attēlā.

Diskdzinis ir aprīkots ar sūkņa piedziņunepieciešama ātruma kontrole tikai šaurā diapazonā. Piedziņa tiek plaši izmantota vidēja un liela jaudas ventilatoros un sūkņu piedziņās, pateicoties augstas efektivitātes un zemām izmaksām.
Statisko Scherbius disku darbības režīmi
Statiskās Scherbius diskdziņu darbības režīmi ir šādi.
Apakšsinhronā motorizācija - Šajā darbības režīmā abi slīpumi un griezes momenti ir pozitīvi, un tāpēc iesmidzinātais spriegums ir fāzē ar rotora strāvu. Jauda ieplūst statorā un atgriezīsies rotora ķēdē.
Super-sinhronā braukšana - Kad motora ātrums ir virssinhronais ātrums, tad slīdne ir negatīva. Tādējādi spriegums un strāva viens ar otru ir ārpus fāzes. Strāvas padeve rotorā tiek piegādāta no piedziņas ķēdes kopā ar ieejas jaudu, kas plūst statorā.
Apakšsinhrona ģenerēšana - Ja sinhronā ātruma gadījumā griezes moments ir pozitīvs, lai gan slīdne ir pozitīva. Jaudu padod rotorā caur slīdēšanas gredzenu.
Super sinhronā ģenerēšana - Kad motora ātrums pārsniedzsinhronais ātrums, tad slīdes un griezes moments kļūst negatīvs. Tādējādi injicēšanas spriegums ir fāzē ar rotoru. Mehānisko jaudu ievada vārpsta un izejas jaudu iegūst no statora un rotora ķēdes.